 400-099-1872
400-099-1872





让机器人拥有一双“人手”:ORCA Hand开源项目全解析,低成本也能玩转高精尖
智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
作为 ROBOTIS 中国区首家授权合作伙伴,智能佳机器人自 2007 年开启合作至今,始终坚守正规渠道承诺:旗下所有 ROBOTIS 产品均为 100% 官方正品,货源可全程追溯,兼具官方品质保障与高性价比优势。
深耕机器人领域多年,智能佳拥有专业技术团队,为您提供全流程服务支持 —— 从售前选型咨询,到售后技术答疑,全程护航您的采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过以下官方正规渠道下单,充分保障自身权益无忧。
京东店铺:http://bjrobot.jd.com
淘宝店铺:http://bjrobot.taobao.com

机器人的 “手”,到底难在哪?
通用机器人需具备类人灵巧性与敏捷度以匹配人类作业能力,类人形态设计便于利用人类手部交互数据。但灵巧操作的硬件瓶颈更突出:人类水准机械手普遍造价高、结构笨重、维护专业,难以广泛普及。
科研领域对灵巧机械手的快速部署需求迫切。因此推出了 ORCA 腱驱动机械手,其具备17自由度与全集成触觉传感器,物料成本低廉,组装时间不超8小时,突破了传统限制。
ORCA 的弹性关节、自动校准等创新设计,降低了结构复杂度并提升了可靠性、精度与鲁棒性。经遥操作、强化学习迁移等任务评估,其可稳定运行超1万次循环(约20小时不间断作业),验证了实用价值。
ORCA Hand 核心物理参数:高 34.5cm、宽 12.5cm、重量1175g。
ORCA Hand配置清单
多种版本可选,新手、动手党都能适配
为了满足不同用户的使用、组装和开发需求,ORCA Hand 提供了多种版本配置,不管是想直接上手使用的新手,还是喜欢自己动手的 DIY 爱好者,或是有定制需求的科研机构,都能找到合适的选择:
ORCA Hand 完整组装版(原装进口)
| 部件名称 | 数量 | 备注 |
| ORCA Hand 灵巧手 | 1 | 原装进口成品发货 |
ORCA Hand 完整组装版(国内组装)
| 部件名称 | 型号 | 数量 |
| 舵机 | XC330-T288-T | 16 |
| 舵机 | XC430-T240BB-T | 1 |
| 舵机启动套装 | U2D2+U2D2 PHB+12V 5A电源 | 1 |
| USB数据线 | USBA-microUSB | 1 |
| 配件 | 散热风扇/轴承/磁铁/圆柱销/毛细管/螺纹杆/螺丝/螺母/传动皮带/垫片/硅橡胶/腱绳 | |
| 注意:整只成品灵巧手 | ||
ORCA Hand 完整散件套装
| 部件名称 | 型号 | 数量 |
| 舵机 | XC330-T288-T | 16 |
| 舵机 | XC430-T240BB-T | 1 |
| 舵机启动套装 | U2D2+U2D2 PHB+12V 5A电源 | 1 |
| USB数据线 | USBA-microUSB | 1 |
| 配件 | 散热风扇/轴承/磁铁/圆柱销/毛细管/螺纹杆/螺丝/螺母/传动皮带/垫片/硅橡胶/腱绳 | |
| 注意:包含组装的核心散件与其它辅料! | ||
ORCA Hand DIY 版组件(核心散件)
| 部件名称 | 数量 | 备注 |
| DYNAMIXEL XC330-T288-T | 16 | DIY组件 |
| DYNAMIXEL XC430-T240BB-T | 1 | DIY组件 |
| DYNAMIXEL启动套装:U2D2+U2D2 PHB+12V 5A电源 | 1 | DIY组件 |
| 注意:DIY版仅包含上述核心散件,组装所需的其它辅料用户自备! | ||

可升级、可适配,未来功能持续解锁
ORCA Hand当前版本包含传感器吗?
不包含。 当前版本的灵巧手尚未集成传感器。我们正在完成传感器连接所需的连接器、线缆和通信协议的最终开发工作。
未来能升级传感器吗?
可以! 我们提供传感器升级服务。当传感器正式可用后,您可以将现有的手爪寄回给我们。我们将为您的手爪加装传感器,您只需支付传感器本身的成本和安装所需的人工费用。
传感器何时可用?
基础力感知: 提供基本开关式力感应的二进制力传感器预计将于 2024年7月末至8月初 上市。
高精度力反馈: 具备精确力测量和高分辨率的先进传感器预计将于 2025年底推出。
ORCA Hand能安装在机械臂上吗?
完全可以! ORCA Hand 有模块化适配器系统,使其能够兼容市面上几乎所有的机械臂。对于您的特定机械臂型号,我们会提供专用的适配器,确保即装即用。

ORCA Hand 注意事项

一、产品现状与责任
1. 免责声明
· 产品处于早期开发阶段,不提供任何质量或可靠性保证。
· 使用风险自负,包括潜在的功能缺陷或安全隐患。
2. 责任限制
· ORCA Hand 不承担因使用产品导致的直接/间接损失(如人身伤害、数据丢失、设备损坏)。
二、许可协议核心条款
A. CAD文件与装配手册(非商业用途)
允许: 个人/教育/研究用途;
非商业性修改与共享(需注明出处);
衍生作品须采用相同许可(BY-NC-SA);
禁止:任何形式的商业使用(包括销售衍生品或实体产品);
逆向工程或用于商业利益;
B. 购买成品/套件(商业许可)
允许: 将实体产品用于商业场景(如研究、产品集成);
禁止:对产品逆向工程、拆卸或复制设计;
基于所购单元分发衍生产品;
转让商业许可(许可与购买单元绑定);
产品含专利技术,未经授权复制可能侵权。
C. 商业使用关键限制
仅官方购买的硬件享有商业使用权;
自行打印的CAD文件/手册不包含商业权利;
修改后的文件不可用于商业目的(除非额外授权);
三、第三方集成
· 与外部设备(机械臂/传感器/VR等)集成时,用户需自行承担风险。
· ORCA Hand 不保证兼容性、功能或安全性问题。
· 用户必须负责校准、安装及安全操作。
四、违约与执行
· 未授权商业使用、逆向工程或违规分发将面临法律追责。
· 衍生作品自动继承原许可条款,不可变更。
四大核心优势,让 ORCA Hand 脱颖而出
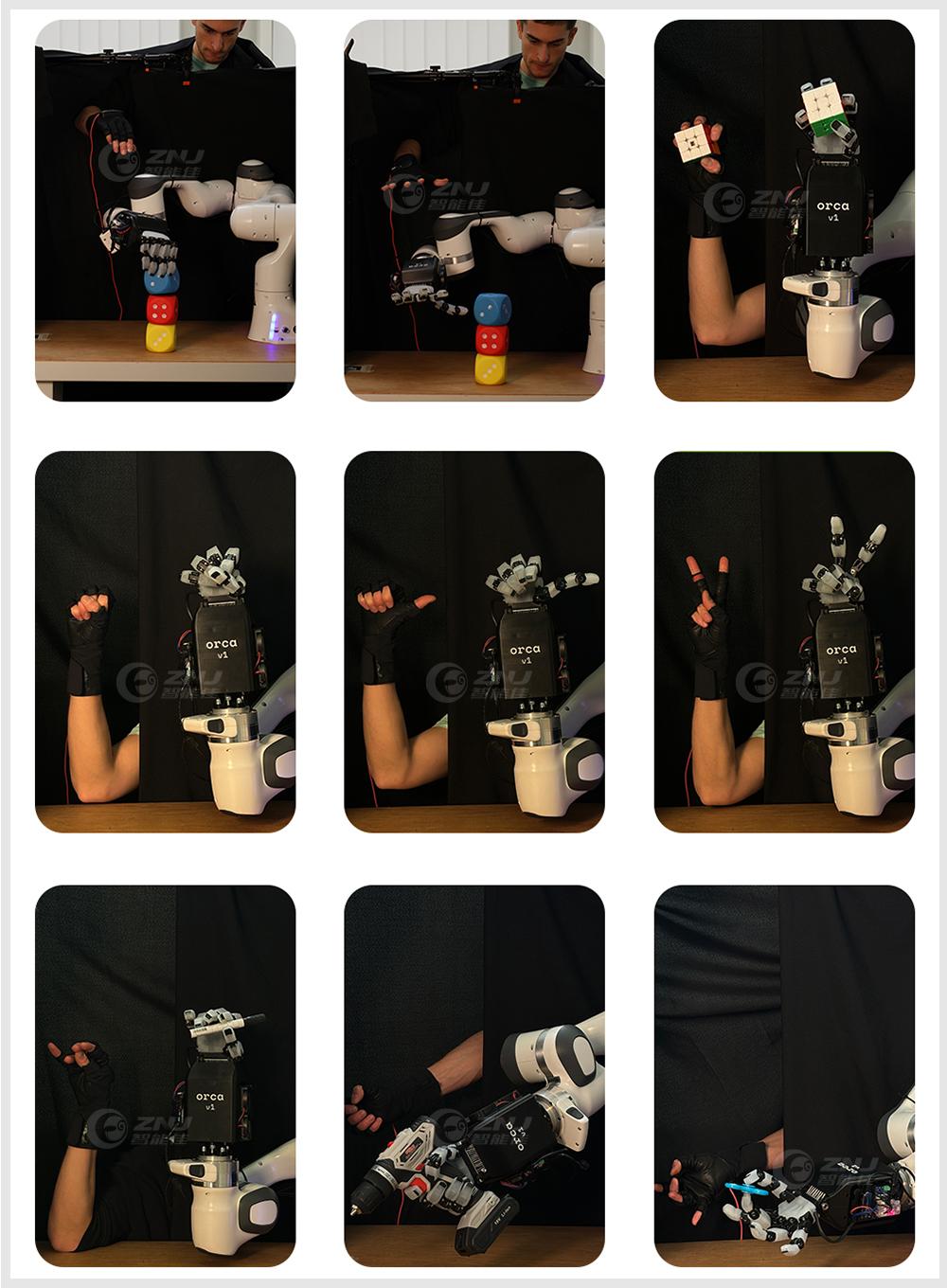
ORCA v1是腱驱动仿人形机械手,复现人类手部结构与运动特性,配置17个自由度(手指16个、腕部1个),可实现灵巧操作,在功能、可靠性与可及性间达成平衡。
一、开源共享特性
项目核心资源全面开源,包括 STL 设计文件、控制软件、物料清单及带视频的组装指南,均通过专属平台公开,为科研人员、教育者及爱好者提供标准化平台,支持设备复现、定制与实验。
二、稳定可靠设计
ORCA 通过专项设计提升可靠性:关节过载保护机制可在负载超标时触发可控脱位,避免核心部件损坏;自动校准系统、低摩擦腱传动路径及模块化架构,共同保障性能稳定与长期可用。
三、经济高效优势
该机械手以3D 打印为核心,总物料成本低廉。结构件适配标准桌面3D 打印机,通用零部件线上可便捷采购,降低应用门槛,保障用户可及性。
四、仿生构型特点
ORCA v1按人类手部比例与关节布局设计,含对向拇指及主动腕部,复现 MCP、PIP、ABD 关节特性,可操作人手适配的工具与物品。其仿生结构简化遥操作流程,提升人手数据训练适配效率。
五、综合应用价值
综上,ORCA v1是机器人实操研究、教学及算法开发的实用平台,助力该领域基础研究与应用转化。
ORCA Hand 【全开源平台】
ORCA v1是完全开源的机械手,其 STL 设计文件、核心控制代码及入门文档将全面公开。平台提供分步组装指南、维修手册等资源,助力用户便捷复现并整合至研究流程。
该机械手设计注重可及性,采用通用材料,配套含采购链接的实时更新 BOM表。凭借低成本、易操作及模块化特性,成为教育与科研利器,尤其适用于机器学习操作模型开发与测试。
ORCA v1为机器人研究提供标准化、可共享的硬件平台,提升研究可复现性与跨机构协作效率。项目采用 MIT 及非商业知识共享许可证,鼓励开放贡献与知识共享。
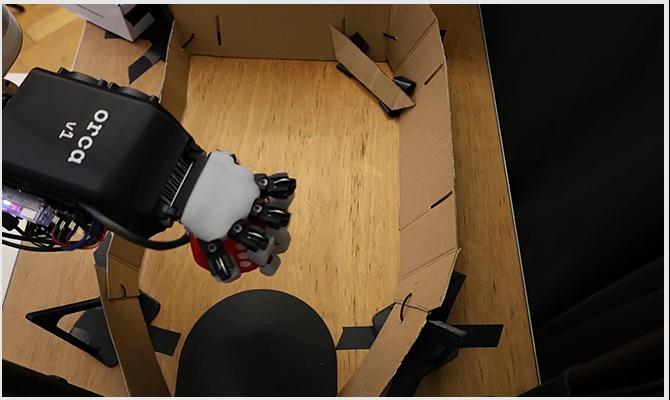
ORCA Hand 【7小时无间断模仿学习】
为验证 ORCA v1硬件平台可靠性,本研究设计了持续抓取-放置任务。机械手抓取立方体并置于滑动表面,立方体随机滑落以自动重置环境。
经模仿学习训练多套策略后,选取最优策略部署于 ORCA 机械手,完成7小时17分(约2000次抓取循环)无人值守测试,仅在辅助环节有极少干预。
测试中策略性能稳定,机械手无肌腱松弛、断裂等故障。实验终止非因系统问题,而是已充分验证平台长时任务的可靠性、鲁棒性与有效性。
ORCA 机械手的长时可靠精细操作能力,为灵巧操控的强化学习技术落地提供支撑,加速相关研究产业化。
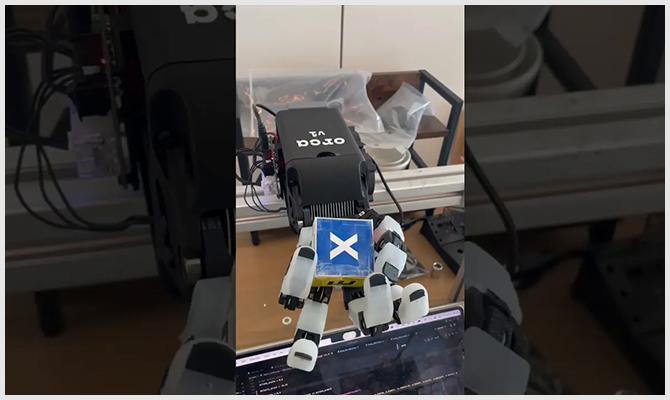
ORCA Hand 【零样本仿真到现实强化学习】
展示了用仿真强化学习训练 Orca 灵巧手完成现实复杂操作的过程。通过 IsaacGymEnvs 环境,采用优势演员-评论家(A2C)架构并行训练4096个 Orca 手仿真模型,目标为实现手掌内网球的精准重定向控制。
结合领域随机化技术以增强策略鲁棒性,仅训练1小时后,仿真策略即成功迁移至实体 Orca 手,使其可沿预设旋转轴稳定完成网球定向操作。
ORCA Hand 【可靠性验证实验】
为评估 ORCA 机械手的长期可靠性与鲁棒性,本研究开展2.5小时连续实验:每4秒驱动全手指抓握掌心毛绒玩具,每16秒驱动腕关节以40°往复屈伸,以测试其耐久性。
实验中,机械手累计完成2250次抓握循环,动作稳定无偏差,未出现结构损坏、电机停转等问题。实时监测显示,各电机最大电流消耗基本稳定,印证其高鲁棒性、运动可重复性及长期运行能力。
需特别说明,实验非因故障终止,而是2.5小时后主动终止,充分验证了系统可靠性。
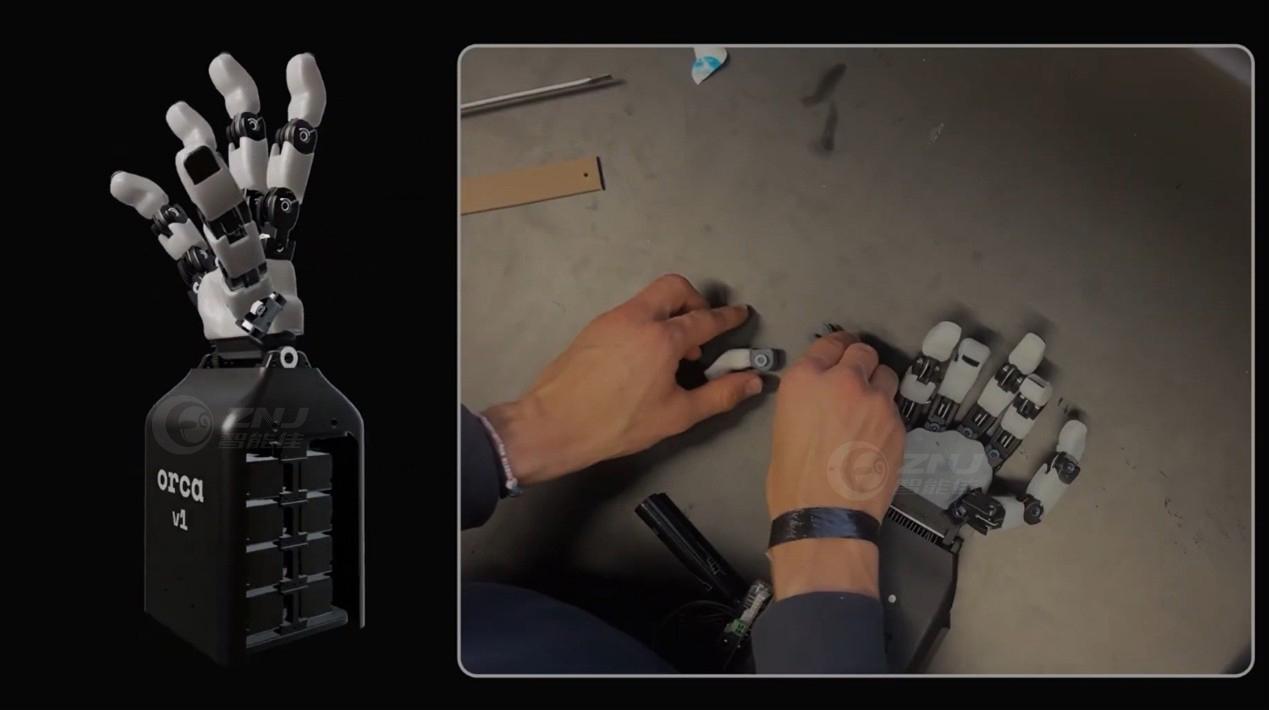
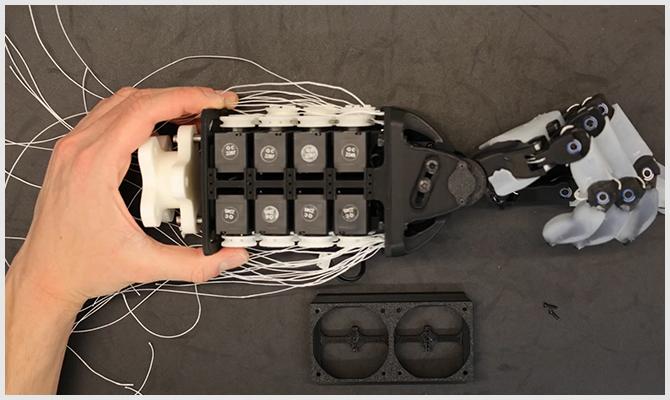
ORCA Hand 【快速便捷组装】
视频请关注:https://www.bilibili.com/video/BV1vv2xB7E7Y/?
ORCA手以便捷组装与维修为核心设计原则。部件齐备时,单人8小时内可完成含集成传感器、预紧肌腱及柔性表皮的 ORCA V1整手组装。我们配套编制详尽装配指南并发布于控制平台,含文字、图示及视频指导。
“可弹出式”关节是简化流程的核心创新:承重过载时安全脱位而非断裂,有效缩短停机时间、延长硬件寿命。所有部件采用3D 打印,损坏后易更换。
这些特性让 ORCA 手成为科研实验室、教育机构及爱好者的理想选择,助力其以高可靠性、高性价比的开源优势开展创新。
ORCA Hand 【关节电机】
XC330系列是XL330系列的升级版。它采用了金属齿轮和轴承,从而增强了耐用性。 1. 多种操作模式速度控制、位置控制、扩展位置控制、PWM控制、电流控制、基于电流的位置控制2. 轮廓控制,实现平滑的运动规划3. 输入电压:6.5V~12V(推荐11.1V)4. 采用金属齿轮和轴承增强耐用性5. 无需额外转换设备即可支持RC协议6. 降低电流,实现节能
 |
|
| 产品 | XC330-T288-T |
| 电机 | 无芯直流电机 |
| 分辨率 | 4096 [pulse/rev] |
| 操作模式 |
电流控制模式 速度控制模式 位置控制模式(0 ~ 360 [°]) 扩展位置控制模式(多圈) 基于电流的位置控制模式 PWM控制模式(电压控制模式) |
| 重量 | 23 [g] |
| 尺寸(W x H x D) | 20.0 x 34.0 x 26.0 [mm] |
| 减速比 | 288.35 : 1 |
| 堵转转矩 |
0.76 [N.m] (at 9.0 [V], 0.61 [A]) 0.92 [N.m] (at 11.1 [V], 0.80 [A]) 1.00 [N.m] (at 12.0 [V], 0.88 [A]) |
| 无负载转速 |
52 [rev/min] (at 9.0 [V]) 65 [rev/min] (at 11.1 [V]) 71 [rev/min] (at 12.0 [V]) |
| 工作温度 | -5 ~ +70 [°C] |
| 输入电压 | 6.5 ~ 12.0 [V] (推荐 : 11.1 [V]) |
| 外壳材料 | 工程塑料 |
| 齿轮材料 | 全金属齿轮 |
| 待机电流 | 17 [mA] |
XC430是XL430(入门级DYNAMIXEL)的高性能版本,可应用于需要更强扭矩的机器人。它采用金属齿轮,提高了耐用性。 1. 多种操作模式(速度控制、位置控制、扩展位置控制、PWM控制)2. 轮廓控制,实现平滑运动规划3. 中空后盖设计,最小化电缆应力(三路布线)4. 易于组装的结构,简单方便5. 降低电流,实现节能
 |
|
| 产品 | XC430-T240BB-T |
| 电机 | 无铁芯电机 |
| 分辨率 | 4096 [pulse/rev] |
| 操作模式 |
速度控制模式 位置控制模式 (0 ~ 360 [°]) 扩展位置控制模式(多圈) PWM控制模式(电压控制模式) |
| 重量 | 65 [g] |
| 尺寸(W x H x D) | 28.5 x 46.5 x 34 [mm] |
| 减速比 | 245.22 : 1 |
| 堵转转矩 |
1.4 [N.m] (at 9.0 [V], 1.1 [A]) 1.7 [N.m] (at 11.1 [V], 1.3 [A]) 1.9 [N.m] (at 12.0 [V], 1.4 [A]) |
| 无负载转速 |
52 [rev/min] (at 9.0 [V]) 65 [rev/min] (at 11.1 [V]) 70 [rev/min] (at 12.0 [V]) |
| 工作温度 | -5 ~ +80 [°C] |
| 输入电压 | 6.5 ~ 14.8 [V] (推荐 : 12.0 [V]) |
| 外壳材料 | 工程塑料 |
| 齿轮材料 | 全金属齿轮 |
| 待机电流 | 46 [mA] |
ORCA Hand 【DYNAMIXEL启动套件】
*DYNAMIXEL 启动套装不含 DYNAMIXEL 单元。
*请通过 ROBOTIS DYNAMIXEL 选型指南为您的项目选择合适的 DYNAMIXEL 型号。
DYNAMIXEL 启动套装是 ROBOTIS 为所有初次使用 DYNAMIXEL 智能执行器的用户,以及寻求将 DYNAMIXEL 连接至 PC 解决方案的用户提供的推荐套装。
通过 DYNAMIXEL 入门套装,用户可实现以下功能:
· 使用 ROBOTIS 软件连接并配置 DYNAMIXEL;
· 为连接的 DYNAMIXEL 提供电源与通信支持;
· 通过 ROBOTIS 编程库/资源操作 DYNAMIXEL(支持 ROS、C/C++/C#、MATLAB、LabVIEW、Python、 Java 等平台)
· 测试并编程 DYNAMIXEL 固件功能;
· 更新与恢复 DYNAMIXEL 固件;
· 执行自诊断与故障排查;
· 通过计算机/SBC(含树莓派)的 USB 端口直接控制 DYNAMIXEL ;

如果您对 ORCA Hand 感兴趣,可以访问其全球项目官网获取全部开源资料:
https://www.orcahand.com/
ORCA Hand 的出现,打破了高性能仿人灵巧手“高不可攀”的壁垒。它将复杂的技术封装在一个开源、低成本、高可靠的平台中,让每一位对机器人抱有热爱的科研人员、教师和爱好者,都能拥有一双探索未来的“手”。
无论你是想研究机器人的抓取算法,还是探索AI与物理世界的交互,ORCA Hand 都为你提供了一个绝佳的起点。
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com



