400-099-1872
400-099-1872





一、TB4和TB3产品参数对比:
|
特征 |
TurtleBot4 |
TurtleBot4 Lite |
TurtleBot3
Waffle Pi |
TurtleBot3 Burger |
|
尺寸 |
342mm*339mm* 351mm |
342mm*339mm *192mm |
281mm*306mm *141mm |
138mm*178mm *192mm |
|
速度 |
0.46m/s |
0.46m/s |
0.26m/s |
0.22m/s |
|
角速度 |
1.90rad/s |
1.90rad/s |
1.82rad/s |
2.84 rad/s |
|
车轮 (直径) |
72mm |
72mm |
66mm |
66mm |
|
负重 |
15Kg |
15Kg |
30Kg |
15Kg |
|
相机 |
双目+AI算法模块+深度+红外夜视+广角+内置IMU |
双目+AI算法模块 |
树莓派单目相机(可升级深度相机) |
X(可增加单目相机或深度相机) |
|
单机(SBC) |
树莓派 4B 4GB(一般升级为NUC) |
树莓派 4B 4GB(一般升级为NUC) |
树莓4 2G/4G (可升级NUC/NANO/NX等) |
树莓4 2G/4G(可升级NUC/NANO/NX等) |
|
微控制器(MCU) |
IRobot Create3 + Arduino ESP32 |
IRobot Create3+ Arduino ESP32 |
OPEN CR(32bit ARM Cortex®-M7 with FPU) |
OPEN CR(32bit ARM Cortex®-M7 with FPU) |
|
内置ROS系统 |
ROS2 |
ROS2 |
ROS/ROS2 |
ROS/ROS2 |
|
电池 |
14.4V 26Wh锂离子电池(内置) |
14.4V 26Wh锂离子电池(内置) |
11.1V 1800Mah 19.98Wh 5C锂离子电池(外置,可升级) |
11.1V 1800Mah
19.98Wh锂离子电池(外置,可升级) |
|
充电桩 |
√ |
√ |
× |
× |
|
360度激光雷达 |
√ |
√ |
√ |
√ |
|
IMU |
√ |
√ |
√ |
√ |
|
UI交互面板 |
√ |
× |
× |
× |
|
蓝牙手柄 |
√ |
× |
√ |
× |
|
标准版价格 |
19800元 |
15200元 |
13699元/14299元 |
5699元/6299元 |
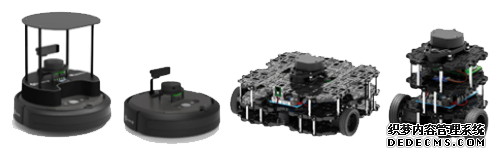
二、Turtlebot 3和Turtlebot 4的比较:
很多未接触过Turtlebot ROS机器人系列的用户,看到TB3和TB4两型号,就会很自然地认为TB4肯定比TB3高级,会问到TB4和TB3的区别,TB4进行了哪些升级?其实接触过后,就会明白Turtlebot只是代表ROS机器人系列的统称,2/3/4代表的是不同品牌厂家作为机器人供应商,生产出不同系列的ROS开源机器人平台。如TB2,是Yujin Kobuki底盘,TB3是Robotis Burger/Waffle拼装底盘,TB4 则是IRobot Create 3底盘。
三款底盘各有优点和缺点,但是基本功能都是可以同样实现的。例如:三款产品都可以安装ROS/ROS2系统、加装处理能力更强大的主板(NUC/NX/NANO等)、加装深度相机、加装遥控和手臂等。2/3/4仅代表合作的厂家不同,机器人不同,并不代表是某款机器人的升级迭代。机器人的处理能力与本身的配置有关系(配置都可选),而不是跟2/3/4有直接关系。用户需要进行选择时,应该重点考虑自己的实际需求(不同学院可能存在不同要求),如:需求的底盘尺寸大小?承载的要求?机器人运行的速度?主控器的处理能力?本身配置具体需要那些传感器等?还有就是价格是否合理、符合用户预算等等。
所以说,TB3和TB4之间标准版参数对比,其实意义并不大。与其问TB3和TB4的区别,不如了解TB2和TB4的区别,因为它们两者之间更相象。(都属于固定式圆形底盘,TB3是拼叠式移动底盘)
三、Turtlebot 4和Turtlebot 2底盘本身的对比:
TB4(IRobot Create3) |
TB2(Yujin Kobuki) |
|
| 重量 | 约3.00kg | 约4.00kg |
| 有效载荷 (kg) | 2kg | 2kg(无臂),1kg(带臂) |
| 长宽高 | 341mm*339mm*351mm(Lite为192mm) | 350mm*350mm*630mm |
| 越障能力 | ≦4.5mm | ≦12mm |
| 平移速度(MAX) | 31cm/s(安全模式),46cm/s(非安全模式) | 70 cm / s |
| 旋转速度(MAX) | 108.87度/秒 | 180度/秒(> 110度/秒陀螺仪性能会降低) |
| 充电时间 | 2.5hrs | 2~3hrs |
| 工作时间 | 2.5~4hrs(取决于负载) | 4~6hrs(取决于负载) |
| 系统 | Ubuntu 20.04 ROS1 / Ubuntu 20.04/22.04 ROS2 | Ubuntu16.04/18.04/20.04/22.04 ROS1/ROS2 |
三、总结:
TB2/TB3/TB4各有自身的优缺点,作为ROS移动机器人平台,可以为用户带来不同的体验感。固定式底盘有固定的好,拼装式底盘也有拼装的乐趣和优势,选择主要还是看用户的个人需求。
想节省下来更多时间进行算法的,可以直接购买组装版本;
想加装机械臂或其他传感器的,也可以根据自身预算来选择适合产品;
对于刚入门学习ROS的用户来说,选择有更多参考资料的产品和可以提供更优售后技术支持的供应商,才是关键!
最后,祝各位ROS爱好者都可以选择到自己合适的产品,创造出更多成绩!
智能佳机器人
客服电话:400 099 1872
公司网址:www.bjrobot.com
ROS网址:智能佳知识社区_北京智能佳科技有限公司 (rosrobot.cn)
购买链接:
TB2 Locobot:智能佳(ZNJ) LoCoBot WX250 6自由度 ROS智能车 Yujin机器人 Kobuki LoCoBot WX250 6DOF【图片 价格 品牌 报价】-京东 (jd.com)
TB3 Burger/Waffle:Turtlebot3系列_轮式机器人_智能佳机器人专营店Turtlebot3系列【价格_图片_怎么样】- 智能佳机器人专营店 (jd.com)
TB4 Locobot:Turtlebot4系列_轮式机器人_智能佳机器人专营店Turtlebot4系列【价格_图片_怎么样】- 智能佳机器人专营店 (jd.com)