 400-099-1872
400-099-1872






该系统为定制化产品!请咨询客服人员、或拨打400-099-1872、或13621041758
车路协同应用示范


为无人驾驶、车路协同教学与实训提供全栈解决方案
车路协同自动驾驶先导实训平台是以微缩、前沿、可用为基本设计理念,模拟真实智能交通系统中的智能车、智慧路网、远程驾驶、中控系统等,在实验室条件下完成对车、人、物、路、环境等各项无人驾驶、车路协同的先导实验。该平台围绕交通产业、汽车产业、机器人、物联网、大数据等产业的相关教学、科研人才培养与输出,促进无人驾驶领域的产、学、研、用形成良性循环,助力实践课程教学与前沿技术先导先试。
建设目的

(1)支撑专业学科的实践教学和实验室平台提升;
(2)支撑相关领域本硕博一体化的人才培养;
(3)支撑车路协同与自动驾驶关键技术的研发与测试;
(4)支撑智能网联汽车标准化先导试验验证;
(5)支撑智能交通应用场景数字孪生技术实施;
(6)支撑户外自动驾驶测试场功能设计及技术验证;
(7)支撑车路协同与自动驾驶科研成果转化与工程应用。
系统核心技术


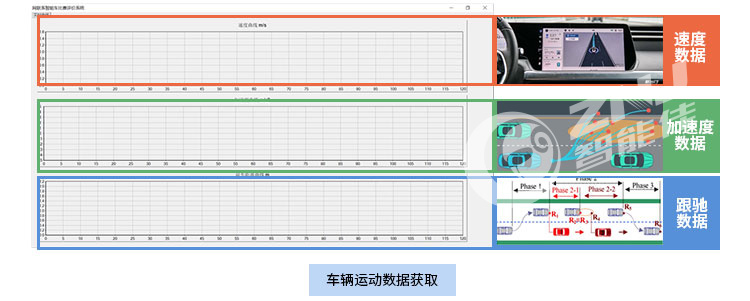
微缩智能车采用阿克曼转向的线控底盘,按照1:10(或1:X)真车比例设计,配备服务器级别的核心处理器,搭载无人驾驶主流的智能传感器,能满足长时间高算力的要求以及复杂矩阵运算的自主决策能力。依靠车载C-V2X通信系统,实现车-车、车-路、车-云的信息交互与感知,满足科研机构、教育机构对自动驾驶、远程驾驶、车路协同和编队控制等驾驶行为的先导先试,促进跨学科、跨领域的产、学、研、用良性循环发展。




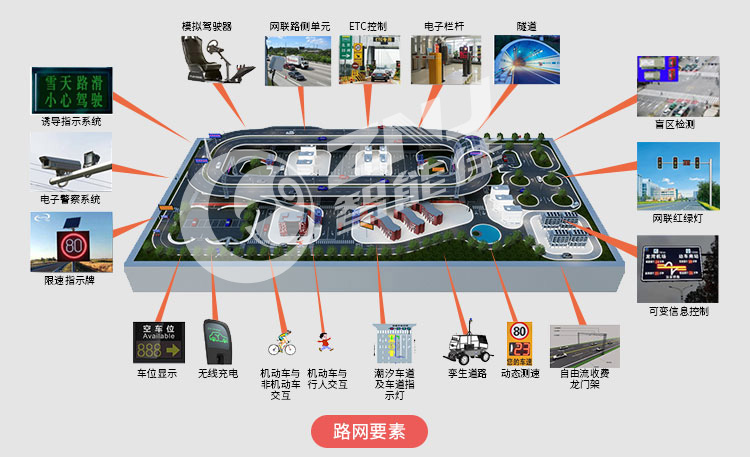
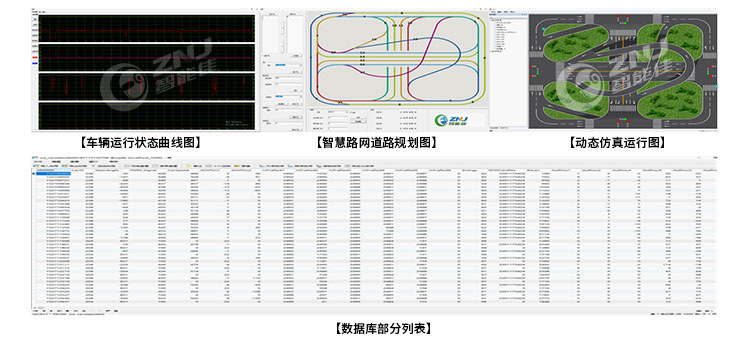
智慧交通路网系统采用半实物虚实融合仿真手段,道路形态按照真实的交通工程设计标准缩小设计,配有C-V2X通信系统、网联信号灯系统、信息发布系统、停车管理系统、电子抓拍系统、人因工程模拟系统、等丰富的路侧设备,实现沉浸式、立体化、虚实结合的新型智能交通环境,便于用户感性、全面、立体的了解智慧交通路网环境,探索前沿技术相关算法验证、功能测试、系统联调等多维度实验验证,完成科研创新、成果转化、工程应用。


![]()

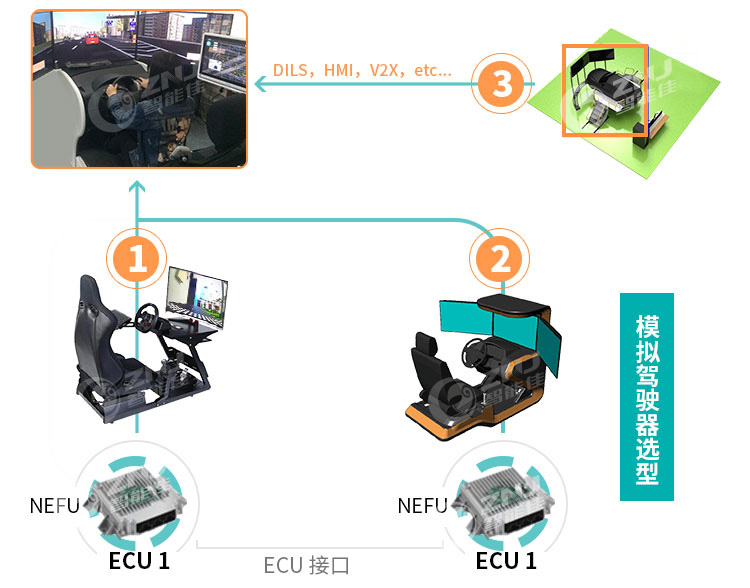
驾驶模拟器作为人类决策因素,可以接管任意一辆智能车的运动控制,如油门、刹车、转向、灯光等,并通过无线信号实时显示第一驾驶视角。该套系统可以从教学、培训、科研、评估等多维度、多层次对智慧交通人因方面的研究和实验,探讨驾驶人行为特性及分心影响,揭示驾驶行为表现,验证有人驾驶对无人驾驶车队影响,展示以人为本智能网联车研究方法及体系。

三相映射基于数字孪生技术,实现智能交通沙盘与驾驶模拟、虚拟交通仿真、真实场景之间的交互与联动,实现“软硬一体、微宏观一体、个体群体一体”的实训化教育教学模式。该模式打破时空限制,对接当前教育教学需求,学生在实验室即可体验前沿智能交通技术、提升学习兴趣、获取实践技能。平台融合“场景-互动-可操性”于一体,以高仿真度技术、虚实融合方法解决与真实道路条件下的一致性难问题,主动训练学生跨学科跨专业技能,全方面、多维度支撑数十门专业课程。
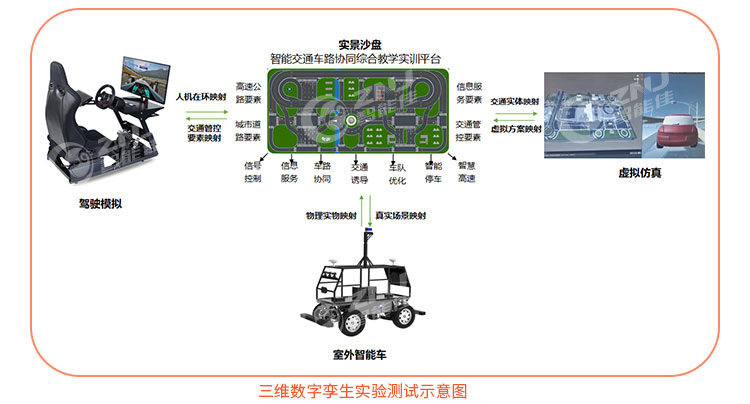

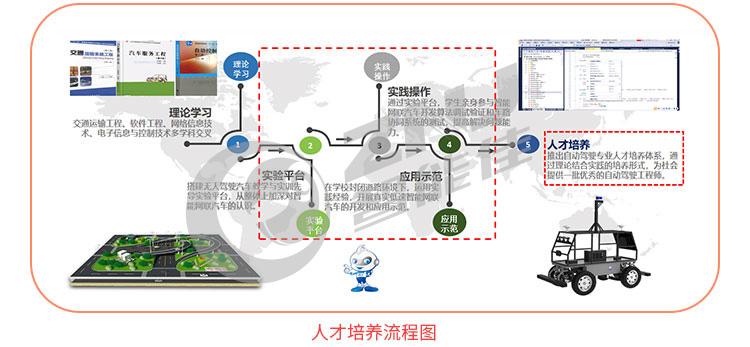
车路协同自动驾驶先导实训平台以培养学生自我发展、自我实践的创新能力,搭建以多学科交叉为特色的综合应用教学实训和成果转化平台。通过平台级和系统级的解决方案,有效融合物理实体、虚实场景、增强现实、数字孪生、人机在环等要素,形成一套针对智能交通、无人驾驶、车路协同、人工智能、大数据、云计算、3D仿真等领域的新兴技术理论-认知-实践-应用创新性闭环人才培养体系。

软硬件配置选项

车路协同视频展示
典型案例

服务内容:基于室外路网搭建了一套未来城市增强现实自动驾驶系统。
核心技术:多车的网联、多车编队、多车竞速、室内外车辆信息数字孪生。
成果输出:发表多篇高水平学术论文,支撑多门实践课程。


服务内容:实现30多辆车的编队与重组,进行交通流模型分析与车队管控研究。
核心技术:OD场景下路径规划、基于5G通信远程驾驶、V2X典型应用场景下多车编队与解散。
成果输出:多项核心算法验证与学术论文发表,真实交通流量控制算法导入。


服务内容:在封闭场景下,围绕多任务多目标,不同种类智能车流程管理体系验证。
核心技术:车辆角色的自定义、车车协同、车路协同、远程调度与管理系统。
成果输出:完成多个场景下汽车服务流程体系评估。


服务内容:车路协同系统下的智慧交通信号控制、特殊车辆路权分配、多车编队控制等。
核心技术:车车协同、车路协同、电子警察抓拍、网联红绿灯绿波验证。
成果输出:交警“新人才”的培养、网联信号控制工程应用。

支持团队


公司动态
车路协同和自动驾驶先导实训平台
作者: bjrobot 时间:2022-05-20 来源:未知
摘要:该系统为定制化产品!请咨询客服人员、或拨打 400-099-1872 、或 13621041758 车路协同应用示范 为无人驾驶、车路协同教学与实训提供全栈解决方案 车路协同自动驾驶先导实训平台是以微缩、前沿、可用为基本设计理念,模拟真实智能交通系统中的智能车、智慧路

