 400-099-1872
400-099-1872





项目页面
LEAP Hand视频展示:LEAP Hand 机械手-视频_哔哩哔哩_bilibili
简介
在机器人技术领域,灵巧操作一直是一项长期存在的挑战。尽管机器学习技术已经展现出了巨大的潜力,但目前的应用大多还停留在模拟阶段。这一现象在很大程度上是由于缺乏合适的硬件支持。为了解决这一问题,本文介绍了LEAP Hand——一款专为机器学习研究设计的低成本、高度灵巧的拟人手。
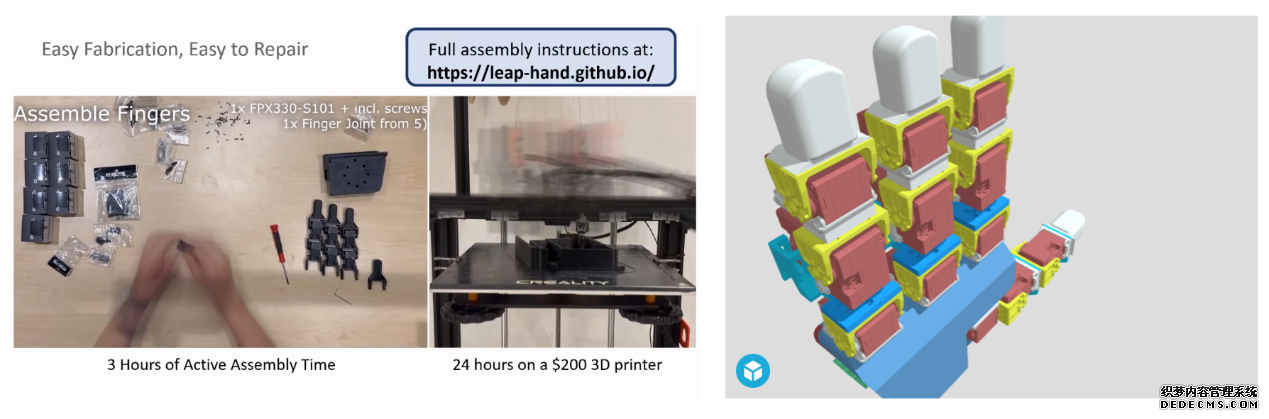
相较于以往的设计,LEAP Hand采用了创新的运动学结构,确保了在各种手指姿势下都能实现卓越的灵活性。这款手的成本非常低廉,且可以利用现成的零件,在短短4小时内完成组装。LEAP Hand不仅成本效益高,还能在长时间内持续提供强大的扭矩输出。
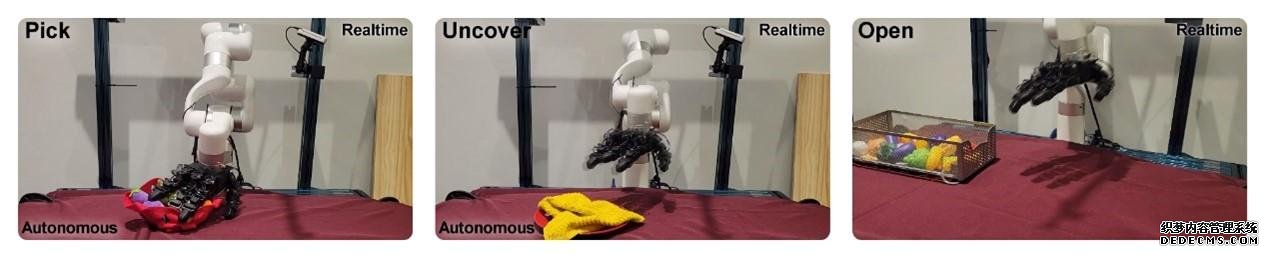
我们在一系列实验中证明了LEAP Hand在现实世界中执行多种操作任务的能力,包括视觉远程操作、被动视频数据学习以及sim2real技术的应用。在所有这些实验中,LEAP Hand都明显超越了其最接近的竞争对手Allegro Hand,同时成本仅为其八分之一。
为了进一步推动机器学习研究的发展,我们在官方网站http://leaphand.com上公开了URDF模型、3D CAD文件、经过精心调优的仿真环境、开发平台,以及一系列优化的API。这些资源将为研究人员和开发者提供极大的便利,帮助他们更高效地开发和测试新的算法和应用。
资料
- Assembly Guide(https://www.leaphand.com/assembly)
- Github - LEAP Hand API(https://www.leaphand.com/assembly)
- Github - Sim2Real(GitHub - leap-hand/LEAP_Hand_Sim)
LEAP Hand(XC330舵机)所需材料
LEAP Hand(XL330舵机)所需材料
警告
此套餐中不包括第三方组件和3D打印件。您需要根据LEAP Hand项目网站上列出的清单,自行购买并打印其他所需的部件。 该套餐产品为散件形式,LEAP Hand需要您根据项目网站上提供的详细组装指南进行组装。
运动学和灵活性
LEAP Hand在手指伸展和收缩状态下均能展现卓越的侧向灵巧性,这归功于其先进的全方位外展-内收驱动机制。

成本
LEAP Hand的造价低廉,仅需三小时,利用普通手工工具即可轻松组装。
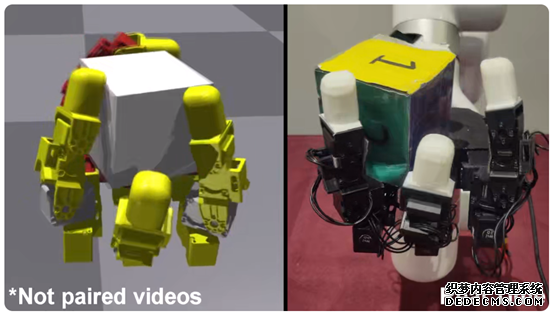
使用Isaac Gym的仿真到现实转换流程
开源项目,欢迎访问此处获取(leaphand.com/sim2real)
同时,敬请关注我们的后续研究:灵巧功能性抓握技术(https://dexfunc.github.io/)
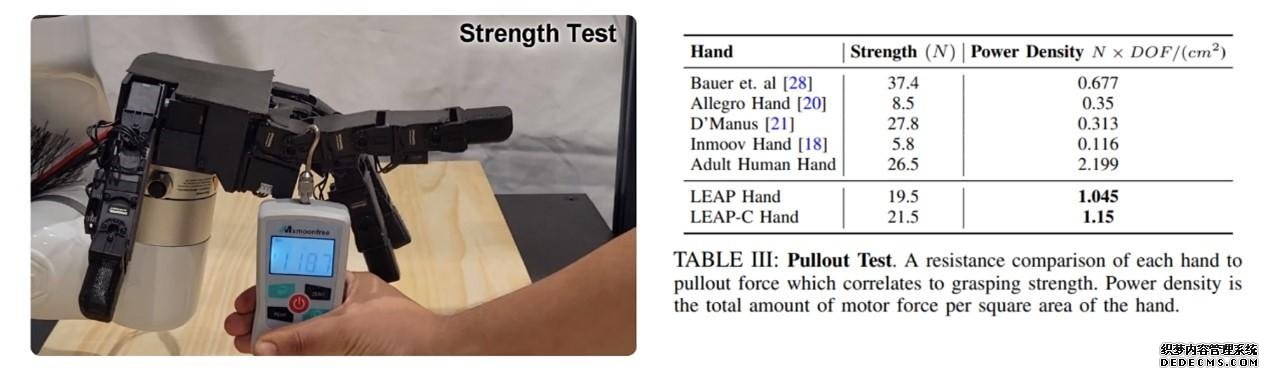
力量
"LEAP Hand" 是当今可用的最强大的机械手之一。
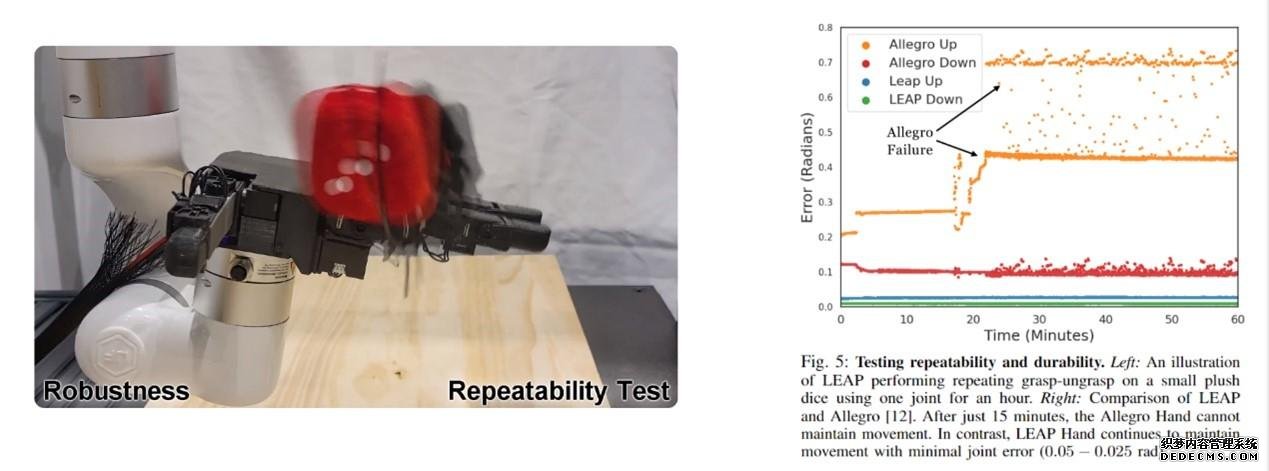
鲁棒性
LEAP Hand 能够精确地完成重复动作而不发生过热。
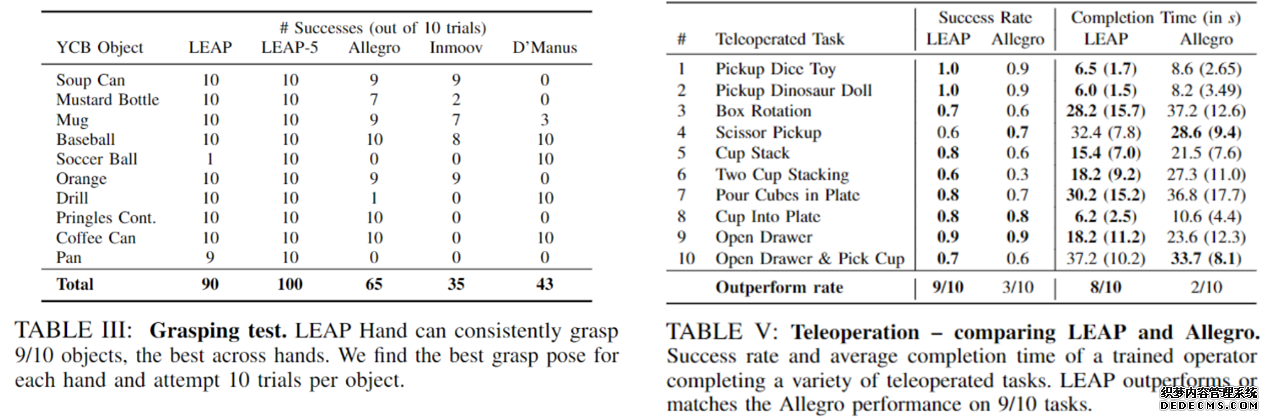
类人的多功能性
LEAP Hand 能够轻松地抓取各种不同的物体。

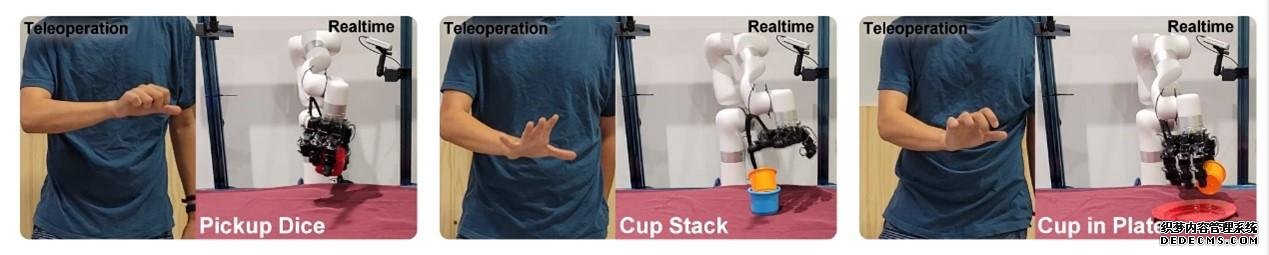
基于未校准人类视频的遥控操作
使用互联网视频的行为克隆

演示
在2023年的RSS大会上进行现场演示!

视频展示:LEAP Hand演示-RSS大会视频_哔哩哔哩_bilibili
BibTeX文献
@article{shaw2023leaphand,
title={LEAP Hand: Low-Cost, Efficient, and Anthropomorphic Hand for Robot Learning},
author={Shaw, Kenneth and Agarwal, Ananye and Pathak, Deepak},
journal={Robotics: Science and Systems (RSS)},
year={2023}}
如果您对此产品感兴趣,请联系我们!
智能佳机器人
400 099 1872
www.bjrobot.com

