 400-099-1872
400-099-1872





微型机器人最常见的用途之一是在灾难现场废墟中寻找被困的幸存者。受昆虫启发的CLARI机器人可能特别擅长这样做,因为它可以让自己变得更瘦,以挤过狭小的水平间隙。
CLARI是由工程博士生Heiko Kabutz领导的团队在科罗拉多大学博尔德分校创建的,其名称是“柔顺腿铰接机器人昆虫”的首字母缩写。他与该大学的助理教授Kaushik Jayaram合作,后者之前创造了一种受蟑螂启发的机器人,可以使自己变平以挤压垂直间隙。
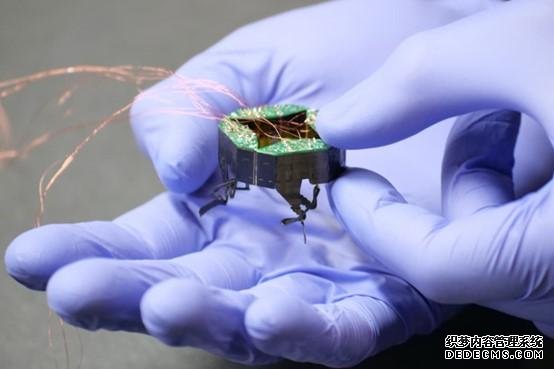
CLARI的四条腿的身体大约有一个寿司卷那么大,从上面看大致呈正方形,由四个部分组成,这些部分通过机器人灵活的外壳相互连接。
每个部分包含一条腿,以及它自己的电路板和双制动器移动腿向前和向后,从一边到另一边。这意味着每条腿都可以独立于其他腿进行操作。
在开阔地上移动时,CLARI会保持其默认的方形形状,以获得最佳的速度和稳定性。然而,如果它遇到一个太窄而无法以这种形式穿过的缺口,它可以将自己重新配置成更长、更窄的形状。就硬数字而言,方形机器人的宽度约为34毫米(1.3英寸),窄型机器人的宽度仅为21毫米(0.8英寸)。
虽然目前版本的CLARI是硬连接到电源和控制源的,但希望它的后代将由电池供电,并配备传感器,使他们能够自主穿越复杂的环境。科学家们还想让这些机器人变得更小,同时为它们配备更多的腿,以提高机动性。
卡布茨说:“当我们试图捕捉昆虫时,它们可能会消失在缝隙中。”。“但如果我们有蜘蛛或苍蝇那样的机器人,我们可以添加摄像头或传感器,现在我们可以开始探索以前无法进入的空间。”
资料来源:科罗拉多大学博尔德分校

