 400-099-1872
400-099-1872





智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
作为 ROBOTIS 中国区正规授权经销商,同时也是 ROBOTIS 中国区第一位的合作伙伴,北京智能佳科技有限公司自 2007 年开启合作至今,始终坚守正规渠道承诺:旗下所有 ROBOTIS 产品均为 100% 官方正品,货源可全程追溯,正品保证、质优价廉,兼具官方品质保障与高性价比优势。
深耕机器人领域多年,北京智能佳科技有限公司拥有专业技术团队,渠道正规、售后服务完善,为您提供全流程服务支持 —— 从售前选型咨询,到售后技术答疑,全程护航您的采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过以下官方正规渠道下单,充分保障自身权益无忧。
京东智能佳机器人专营店:http://bjrobot.jd.com
淘宝智能佳机器人店铺:http://bjrobot.taobao.com
淘宝智能佳机器人官方店铺:http://shop240598203.taobao.com/index.htm
视频请观看B站:https://www.bilibili.com/video/BV16a5Z6qEyG/

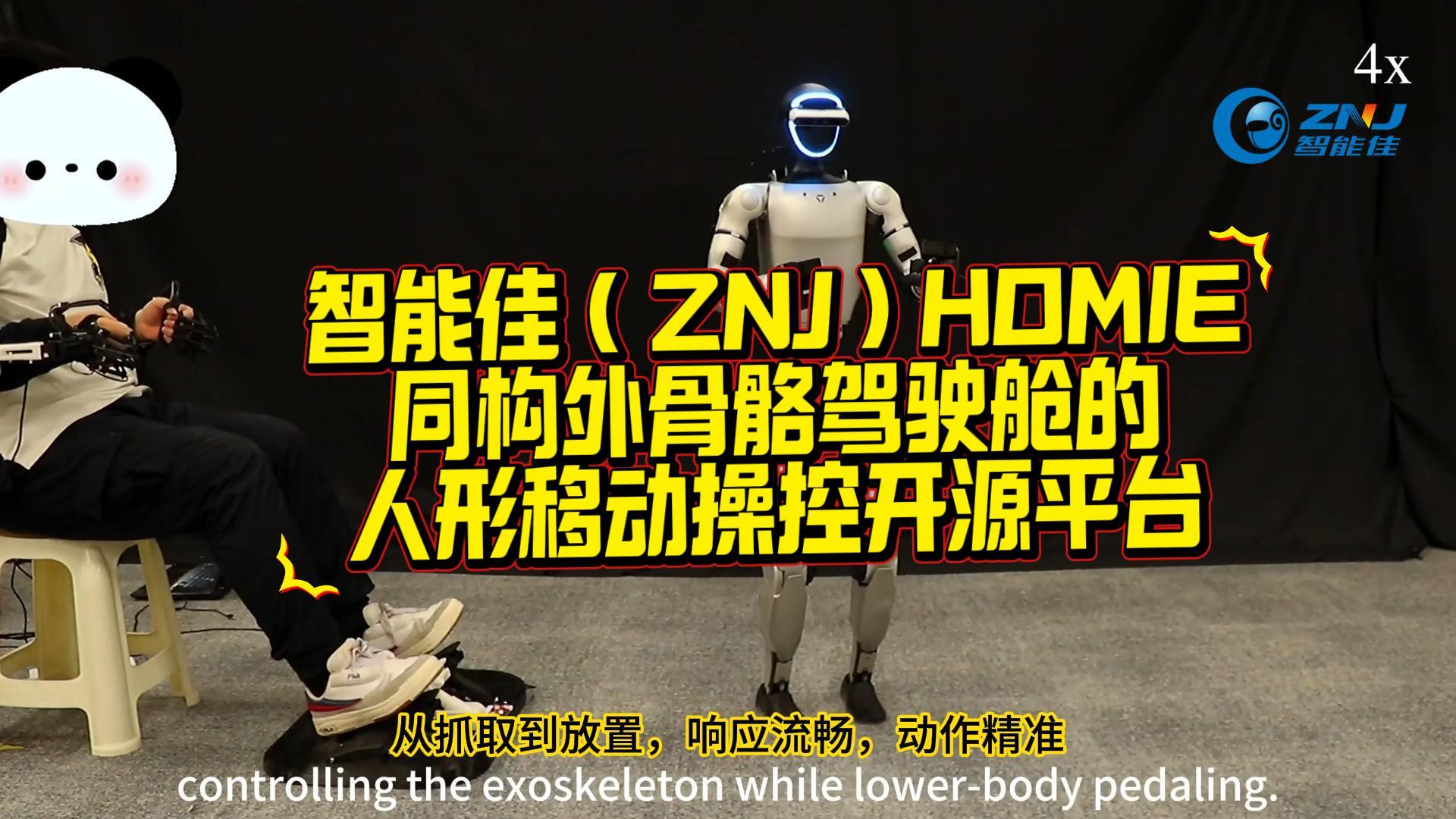
当前人形遥操作系统或缺乏可靠底层控制策略,或难以获取精确全身指令,导致移动操作任务遥操作困难。为此,HOMIE——一种新型人形遥操作驾驶舱——集成了人形移动操作策略与基于低成本外骨骼的硬件系统。该策略使机器人能够在行走和下蹲至特定高度的同时适应任意上半身姿态,其强化学习训练框架引入上半身姿态课程、高度跟踪奖励及对称性利用,无需运动先验。硬件系统包括同构外骨骼手臂、动作感应手套和脚踏板,实现单人操作员对机器人的完全控制。实验表明,与基于逆运动学的方法相比,该驾驶舱实现了更稳定、快速、精准的遥操作,加快任务完成速度并消除重定向误差。此外,验证了通过该驾驶舱采集的数据用于模仿学习的有效性。


HOMIE 配置清单
| Dynamixel XL330-M288-T | 14 |
| U2D2 转接器+PHB 电源集线板+5V 电源 | 1 |
| FPX330-H101 | 2 |
| 全套3D打印结构件 | 1 |
| PCB | 1 |
| 传感器螺丝螺母等连接件套件 | 1 |

硬件不是天价:低成本的同构外骨骼驾驶舱
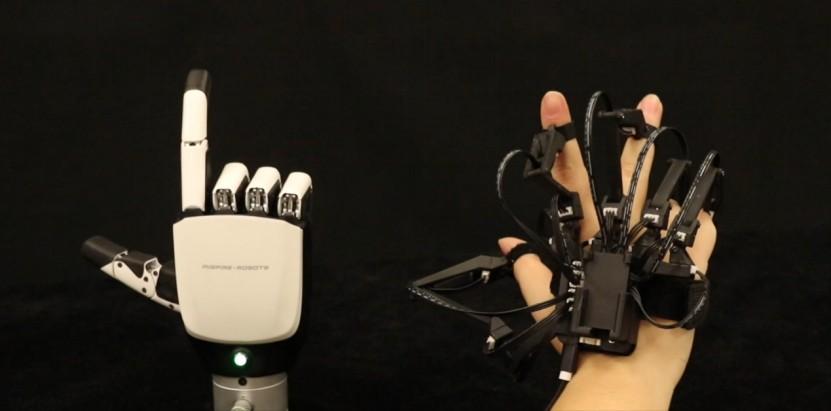
硬件系统包含同构外骨骼手臂、一副运动感应手套及一个踏板。踏板用于获取运动指令,从而解放操作者的上半身,使其能够同时获取上半身姿态。由于外骨骼手臂与被控机器人同构,且每只手套具有15个自由度(DoF),超过多数现有灵巧手,因此可直接根据外骨骼读数设定上半身关节位置,无需逆运动学(IK),从而实现更快、更精准的遥操作。
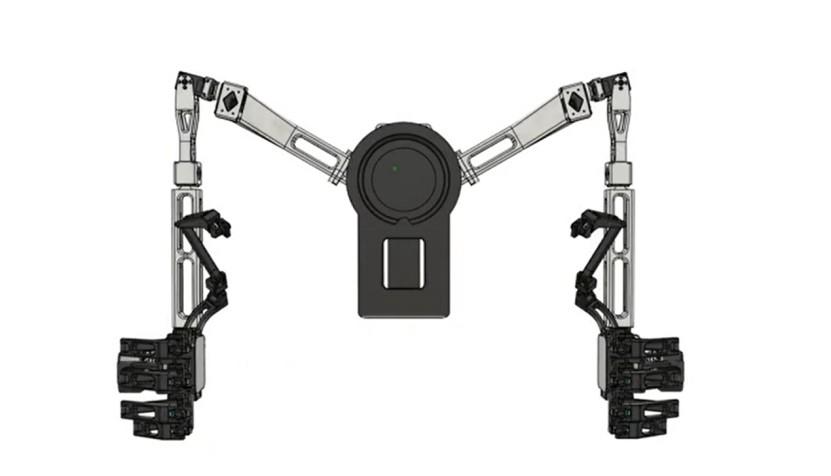
手臂与手部
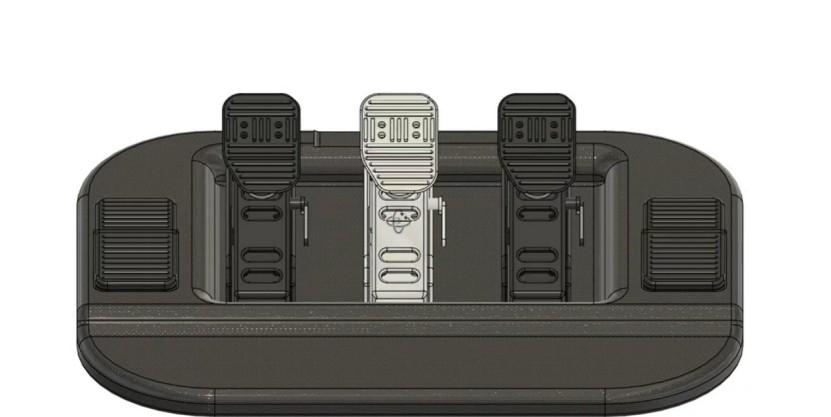
脚踏板
硬件系统针对宇树G1和傅利叶GR-1设计。值得注意的是,该手套可与手臂分离,从而能够在与不同机器人同构的系统中重复使用。

宇树G1的同构外骨骼

傅利叶GR-1的同构外骨骼
借助该硬件系统,单个操作员可选择控制
多种灵巧手
人形机器人的上半身
人形机器人的全身
整个硬件系统的总成本低廉,远低于动作捕捉设备。
重新定义“够稳”:一个不依赖动捕的强化学习框架
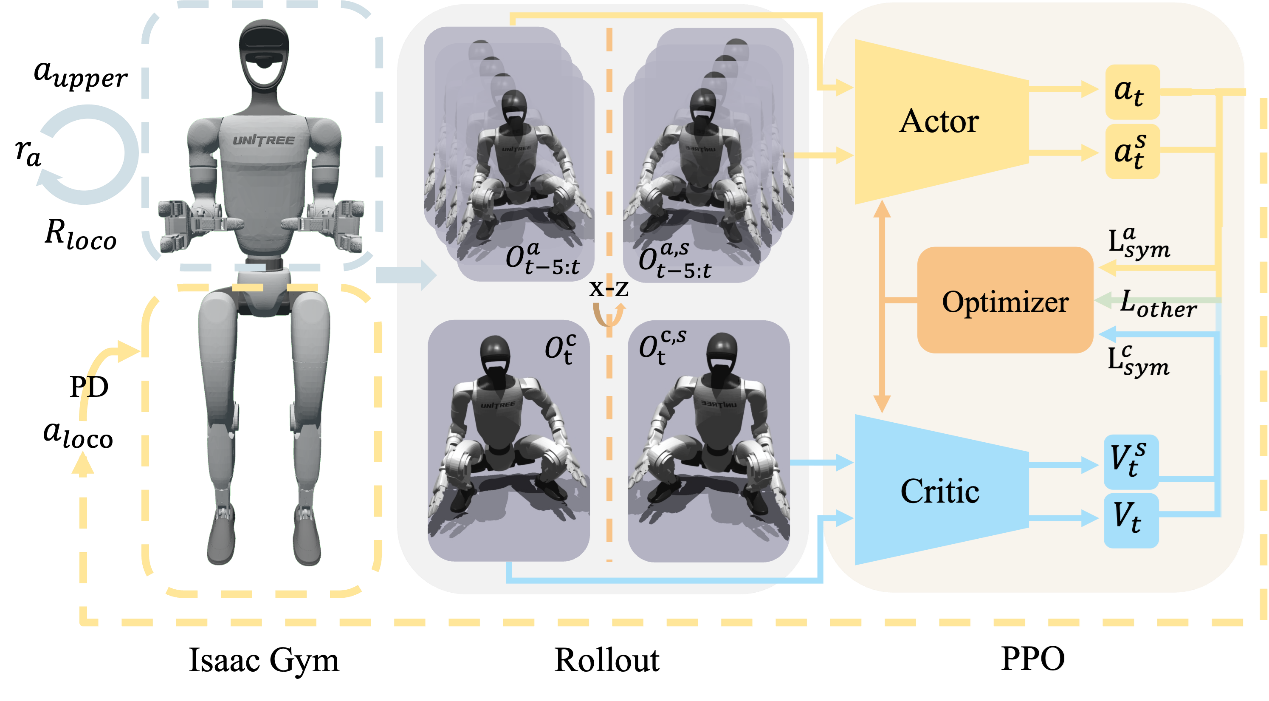
在基于强化学习的训练框架中引入三项核心技术,以显著扩展人形机器人的可操作工作空间并确保移动鲁棒性:
- 上半身姿态课程(Upper-body pose curriculum):使机器人在上半身姿态不断变化时保持平衡。
- 高度跟踪奖励(Height tracking reward):使机器人能够鲁棒且快速地蹲至任意所需高度。
- 对称性利用(Symmetry utilization):使机器人动作更对称,提升数据效率。
该框架完全不依赖动作捕捉(MoCap-free),从而实现更高效的训练流程,并可适用于不同类型的机器人,例如宇树 G1(Unitree G1)和傅利叶 GR-1(Fourier GR-1)。
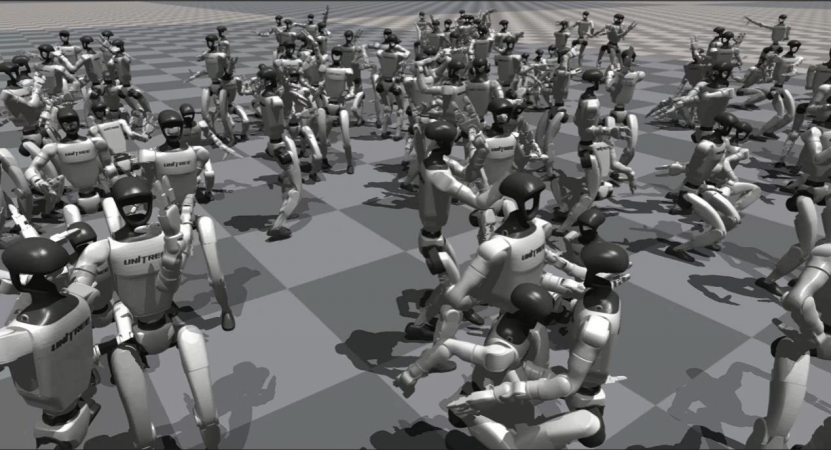
在Isaac Gym中训练的宇树G1

在Isaac Gym中训练的傅利叶GR-1
基于该框架,在Nvidia RTX 4090上仅训练约3小时,即可获得能够直接部署到现实世界中、使机器人稳健行走和下蹲的策略。
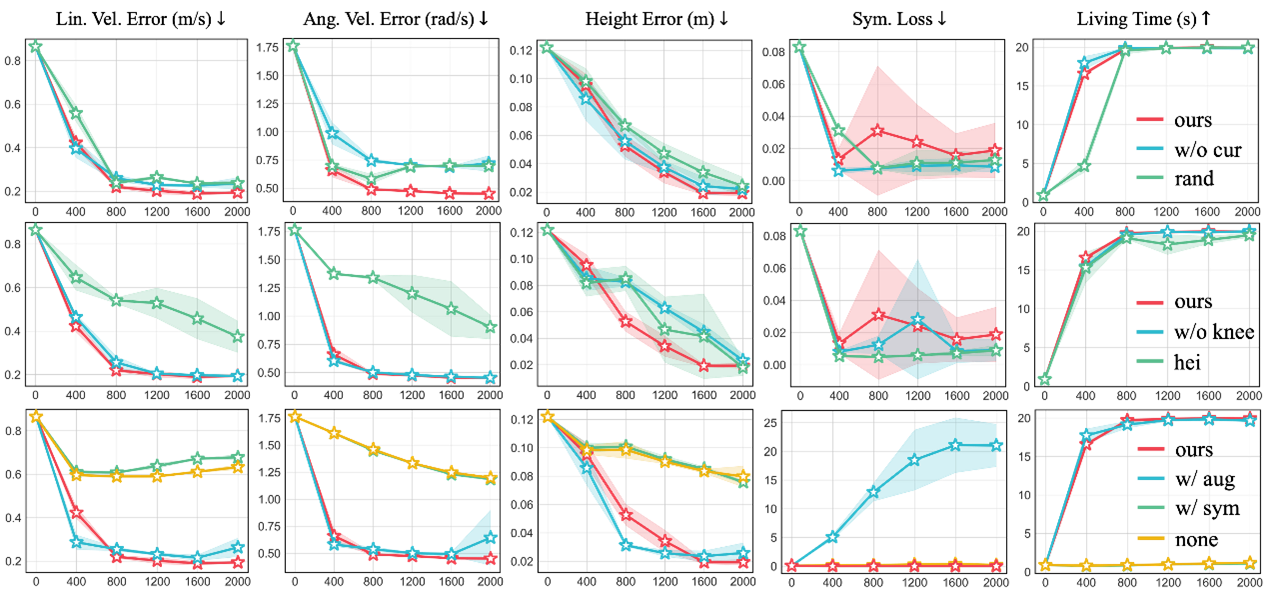
通过消融实验验证了该框架的有效性,结果如下:
- 与无课程或采用其他课程风格的方法相比,上身姿态课程能够帮助机器人逐步学会在动态上身动作下更好地保持平衡。
- 引入新颖的高度追踪奖励可加速机器人下蹲动作的训练。
- 利用对称性不仅将训练过程显著加速10倍以上,还能保证训练出的策略具有对称性。
现实世界检验:更快、更稳、更多任务
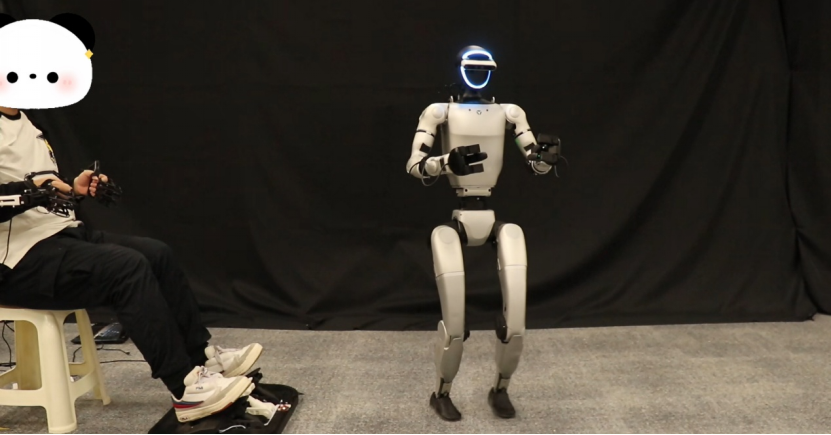
训练好的策略被部署到现实世界中的宇树G1上,并利用同构外骨骼硬件系统对其进行遥操作,以执行各种移动操作任务。

在上半身姿态变化下的行走
上半身姿态变化下的下蹲
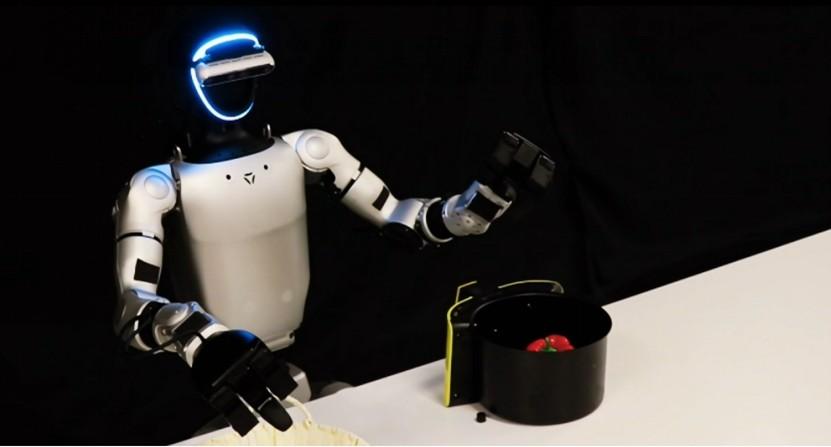
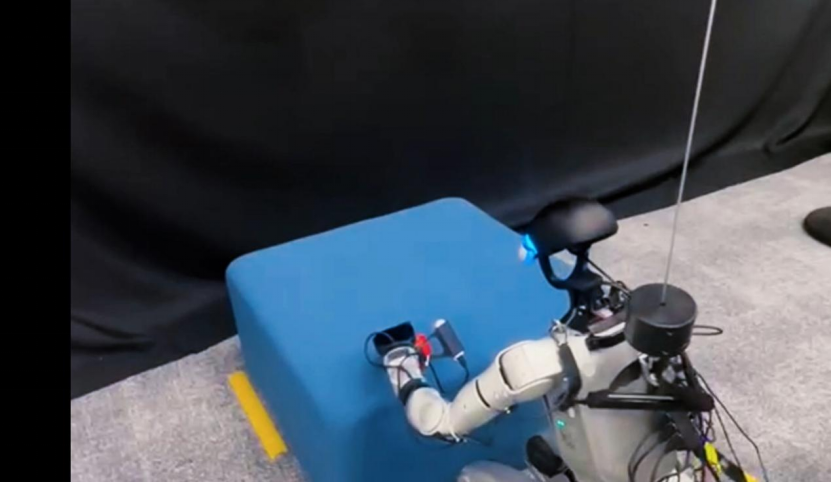
蹲下拿花并转移
蹲下抓取瓶子
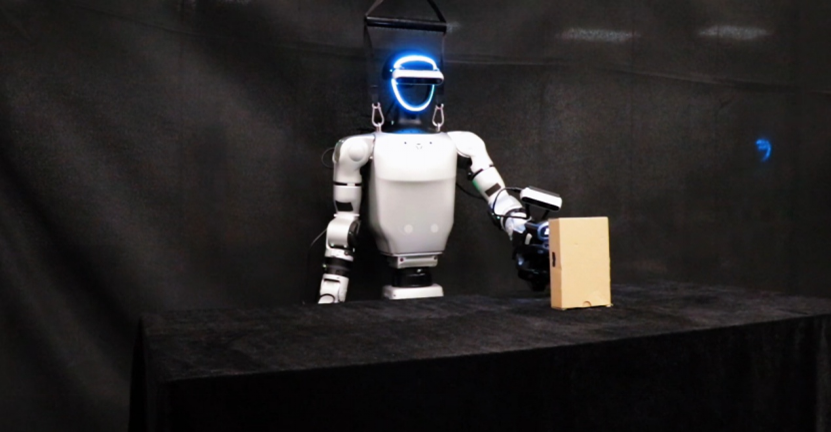
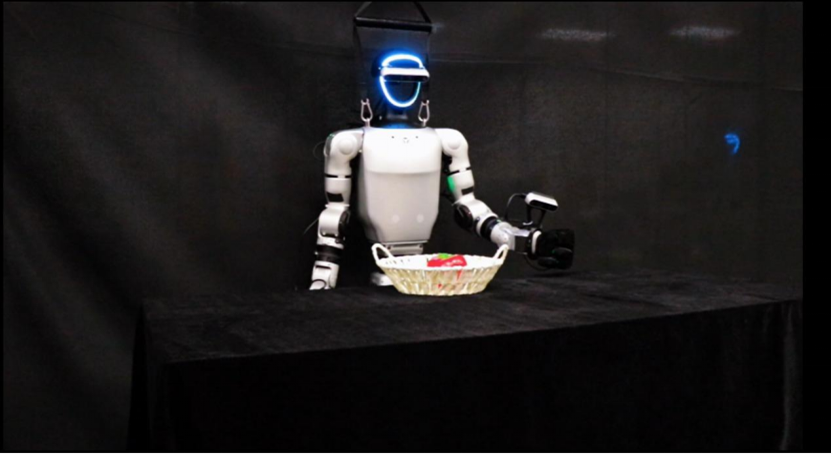
交接与取放

后退并打开烤箱

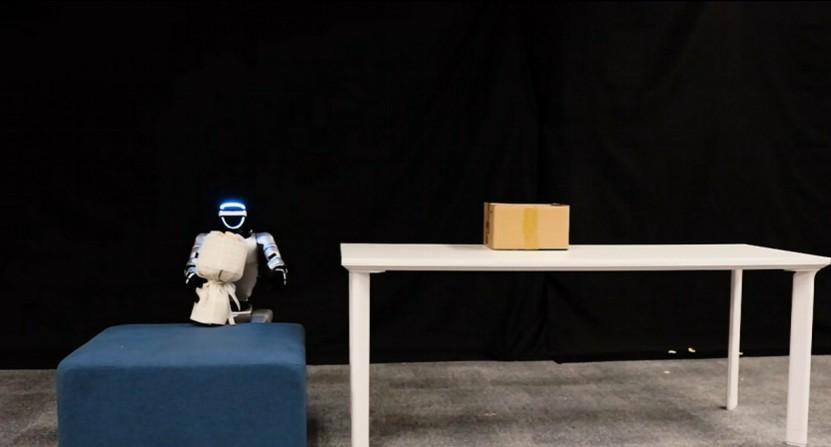
将抓取动作从低处转移到高处

将一个箱子从一个货架转移到另一个货架

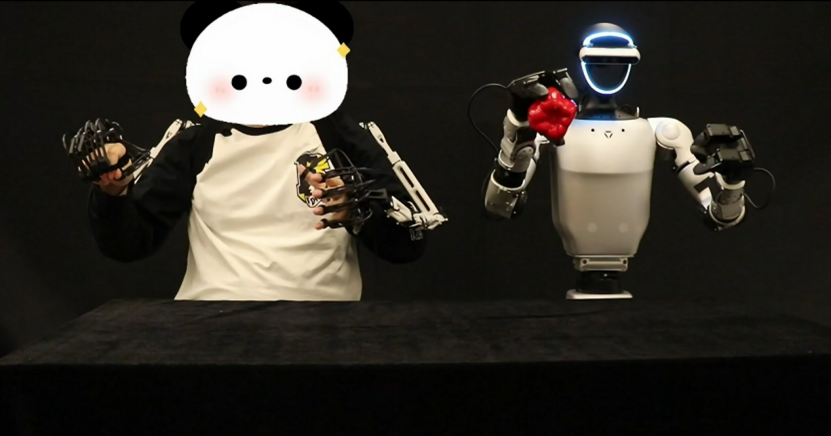
推坐在椅子上的人

两台机器人之间的交接
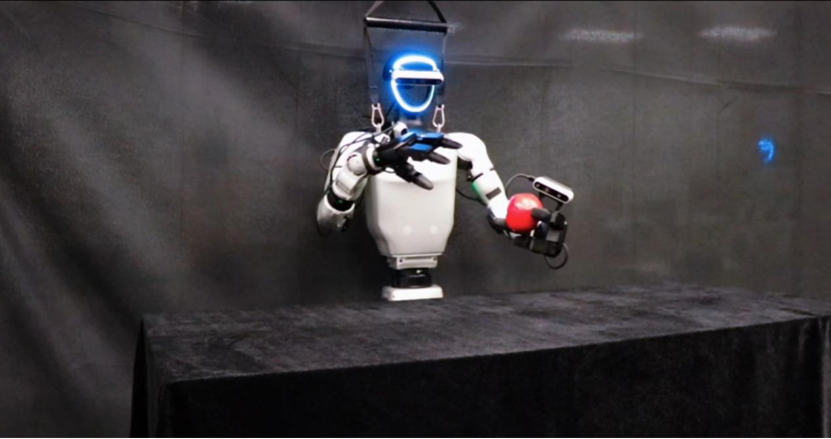
为进一步展示该策略的鲁棒性,进行了一系列实验。
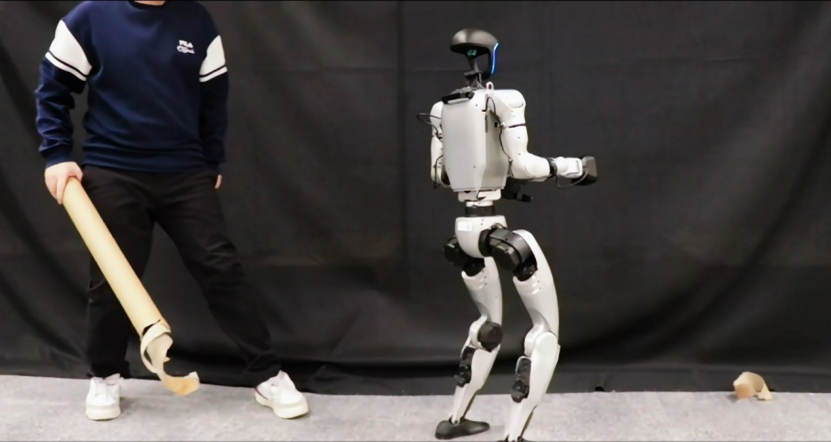
强力击打
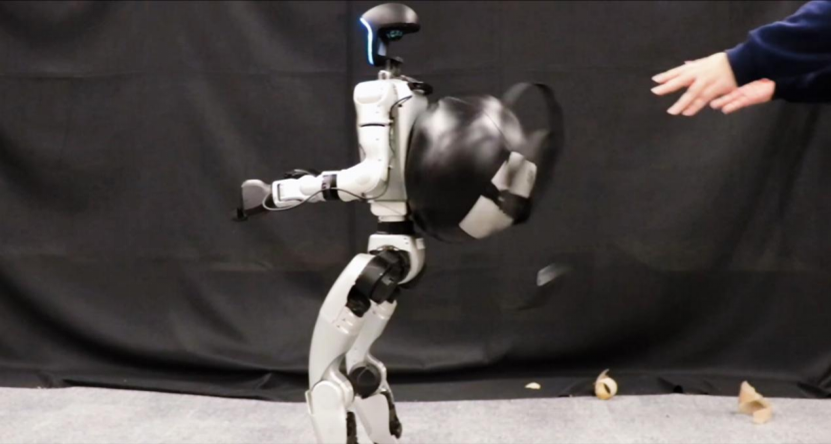
用重球击打
为展示同构外骨骼的有效性,在四种不同任务上比较了该硬件系统与OpenTelevision的任务完成时间。
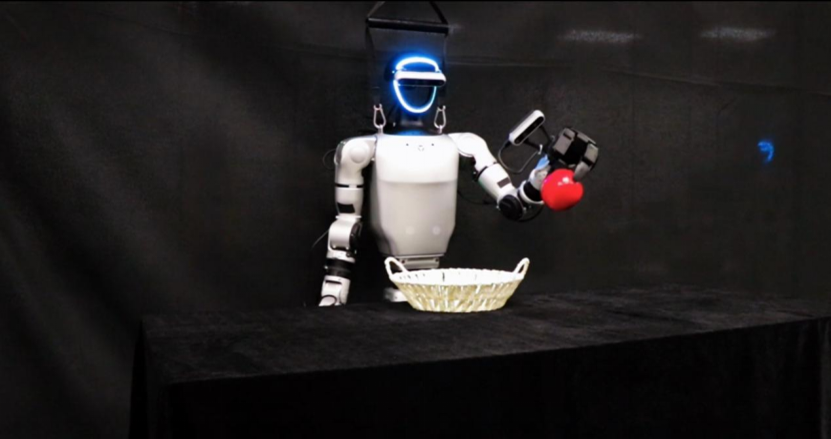
取放
扫描条形码
交接
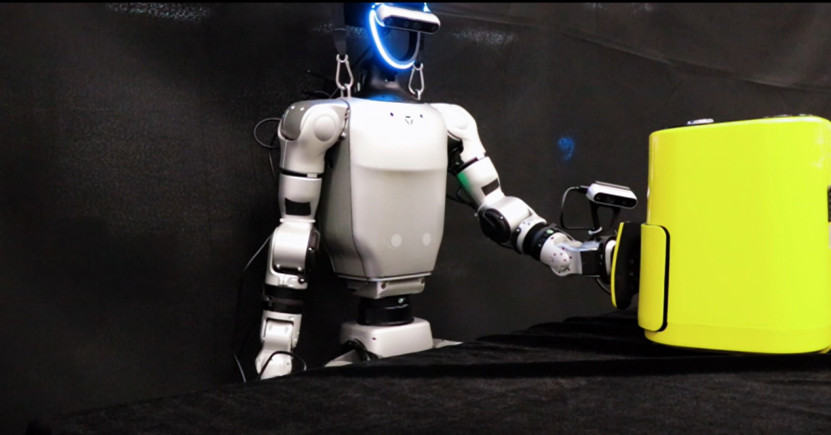
打开烤箱
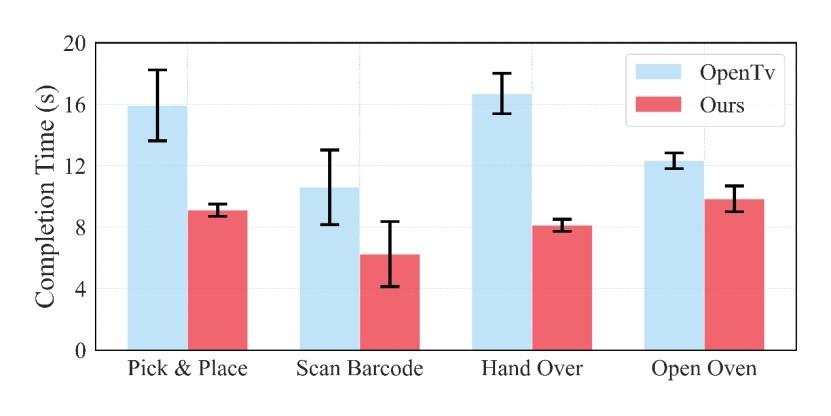
任务完成时间基于三位不同操作员的数据计算,每位操作员对每个任务执行三次。该硬件系统能够将遥操作速度提升约2倍,尤其是在需要径向移动的任务中。
超越遥操作:仿真迁移与模仿学习
HOMIE 的价值不仅在于遥控本身。团队进一步将训练好的策略从原始的 Isaac Gym 仿真环境,迁移到 GRUtopia 场景中。这使得机器人能在丰富多样的虚拟室内环境里执行移动操作任务,为低成本、大规模的数据采集和算法迭代提供了可能性。

GRUtopia 中的宇树 G1

GRUtopia 中的傅利叶 GR-1

GRUtopia 中的移动操作任务完成
更关键的是,利用 HOMIE 驾驶舱收集的遥操作演示数据,可以直接用来训练模仿学习策略。在“蹲下拾取”和“拾取与放置”两项真实任务中,用这些数据训练出的策略在真实机器人上取得了超过70%的成功率,充分验证了该平台作为高质量数据采集工具的潜力。
蹲下拾取
拾取与放置
HOMIE 打破了人形移动操控遥操作的常见壁垒:它证明了,通过精巧的强化学习课程设计与奖励塑造,可以获得同时兼顾行走鲁棒性、高度调整与上半身灵活性的全身控制策略;同时,一套低成本的同构外骨骼,足以替代昂贵动捕设备,实现更快速、更直观的精准控制。
目前,HOMIE 已作为开源平台发布。它不仅为研究人员提供了一个高性价比的人形遥操作解决方案,也为从遥操作数据走向自主技能的模仿学习铺平了道路。
资料来源:https://homietele.github.io/
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com



