 400-099-1872
400-099-1872





受日本剪纸艺术的启发,研究人员开发了一种既温和又坚固的新型机器人抓手 Jie Yin/北卡罗来纳州立大学
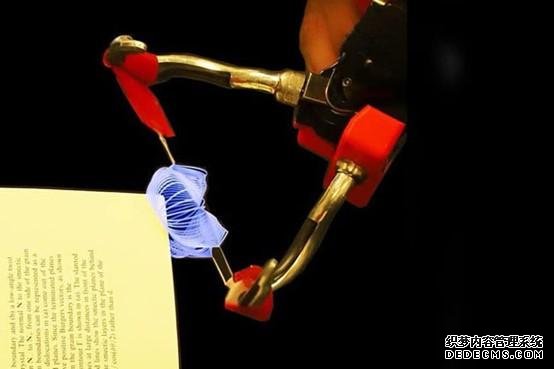
研究人员利用一种受日本剪纸艺术启发的新颖设计,开发出了一种温和而坚固的机器人抓取器,它可以折叠衣服,抓住一滴水和超薄微纤维,举起16000倍于自身重量的东西,还可以翻页。该设备具有广泛的潜在应用,从假肢到微创手术和深海探险。
最近,我们看到了大量的机器人抓取器,包括无电操作的抓取器,灵感来自花朵,或者运动的木制“手指”。但是,北卡罗来纳州立大学的研究人员可能刚刚开发出更高级的机器人抓手。
该研究的通讯作者Jie Yin说:“由于强度、精度和温和性之间的权衡,很难开发出一种能够处理超软、超薄和重物的单一柔软夹具。”。“我们的设计完美地平衡了这些特点。”
为了在各种情况下都有用,理想的抓握器要能够在需要的地方精细使用,同时也能够表现出力量和灵活性。为了实现这些目标,研究人员从日本剪纸艺术那里获得了基里加米的灵感。
与折纸密切相关的基里加米,二维纸被折叠和切割以形成三维形状。研究人员发现,使用基里加米风格的设计为他们的抓手提供了独特的优势。
尹说:“机器人抓取器的强度通常是以有效载荷与重量的比值来衡量的。”。“我们的抓手重0.4克,可举起6.4公斤[14.1磅]。有效载荷与重量之比约为16000。这比之前6400的有效载荷重量比记录高出2.5倍。结合其温和和精确的特点,夹持器的强度表明其应用范围广泛。”
根据研究人员的说法,这些特征更多地与夹具的设计有关,而不是它们的制造材料。
该研究的主要作者Yaoye Hong说:“实际上,这意味着你可以用可生物降解的材料制造夹子,比如坚固的植物叶子。”。“这对于只想在有限的时间内使用夹持器的应用尤其有用,例如在处理食品或生物医学材料时。我们已经证明,夹持器可以用于处理尖锐的医疗废物,如针头。”
说到应用,在概念验证测试中,研究人员将他们的抓手与肌肉控制(肌电)假手集成在一起,证明了它可以翻页并从葡萄藤上摘葡萄。
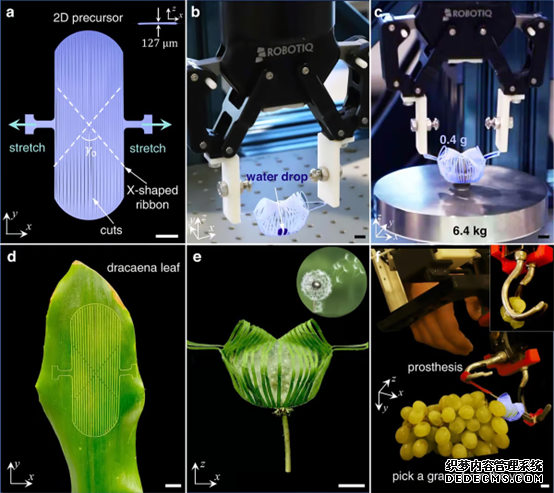
基里加米手爪可以抓住水滴和6.4公斤/14.1磅的重量,集成在假手中,由植物材料制成 洪等人/北卡罗来纳州立大学
研究合著者He(Helen)Huang说:“这种夹子增强了使用现有假肢难以完成的任务的功能,比如拉某些类型的拉链、捡硬币等等。”。“新的夹具不能取代现有假手的所有功能,但它可以用来补充其他功能。基里加米夹具的优点之一是,你不需要更换或增加机器人假肢中使用的现有电机。在使用夹具时,你可以简单地利用现有电机。”
但研究人员相信,他们的新型夹子可以用于更多的用途。
尹说:“我们认为这种夹持器的设计在从机器人假肢、食品加工到制药和电子制造等领域都有潜在的应用。”。“我们期待着与行业合作伙伴合作,找到使用该技术的方法。”
资料来源:北卡罗来纳州立大学

