 400-099-1872
400-099-1872





最近,用户反馈了这么一个问题:
他想把BT410接openRB,把BT410接openRB按照每个TX,RX,GND,VCC.也写了一个程序,但是却不能按照预期想的那样工作,这令他很烦恼。
下面是测试过程:
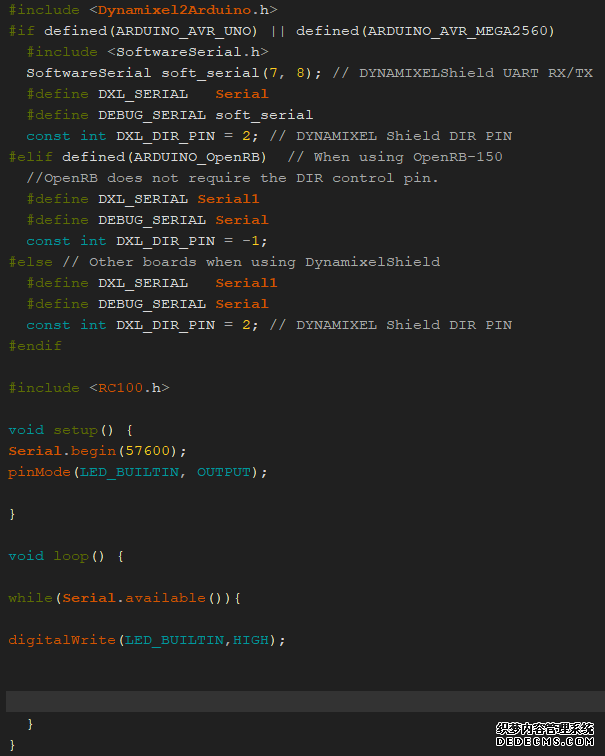
他的程序设想是:读取到任何数据时就打开LED。
经过测试,却发现LED不亮。
当然,对于 BT-410,连接是正常的。
它似乎能够接收串行传入的数据,但它似乎不起作用。
回答:
您写道您使用的是 BT-410,所以我假设您已在OpenRB-150板上焊接了一个 4 针接头,并且您已将BT-410插入那里。然后您的BT-410连接到Serial2(就 Arduino 而言)。
但是在您给出共享的示例代码中,您只使用连接到USB-C端口的串行,因此是连接到Arduino IDE中的串行监视器,而不是通过BT-410 (Serial2)。
所以,我要问你的问题是“BT-410 的另一个通信端是什么?”
如果是文本终端,您可以正常使用 Serial2.begin()、Serial2.read()、Serial2.write()。您不需要包含 <RC100.h>。
如果它是物理或虚拟RC-100遥控器,那么您是对的,您需要包含 <RC100.h>。但是,您写道,当您使用 RC100.ino 示例时出现库错误,这是因为该示例使用的是 DynamixelShield 库,而不是您在共享示例中显示的 Dynamixel2Arduino 库。此外,RC100.ino 示例使用的是Serial1 - 请参见下图中的第 38 行
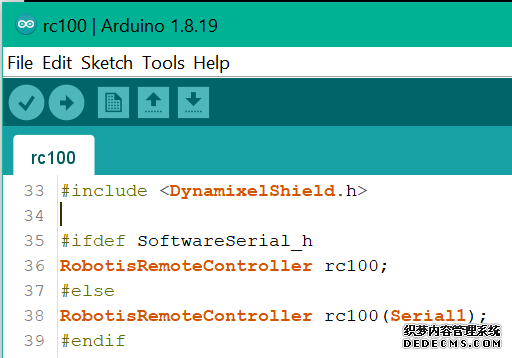
因此,您需要在第38行将Serial1更改为Serial2,然后RC100.ino示例应该适合您(使用 DynamixelShield 库)。
如果你想继续使用 Dynamixel2Arduino 库,那么你必须使用这种编码方法。

行业资讯
OpenRB+BT410蓝牙模块连接问题
作者: bjrobot 时间:2022-10-12 来源:未知
摘要:最近,用户反馈了这么一个问题: 他想把BT410接openRB,把BT410接openRB按照每个TX,RX,GND,VCC.也写了一个程序,但是却不能按照预期想的那样工作,这令他很烦恼。 下面是测试过程: 他的程

