 400-099-1872
400-099-1872





基于 DYNAMIXEL舵机,低成本高精度数据采集平台
智能佳机器人(www.bjrobot.com)——ROBOTIS中国区资深合作伙伴!
作为 ROBOTIS 中国区首家授权合作伙伴(始于 2007 年,合作至今),智能佳机器人始终坚守正规渠道承诺:所有 ROBOTIS 产品均为 100% 官方正品,货源可全程追溯,兼具品质保障与高性价比优势。
深耕机器人领域多年,智能佳配备专业技术团队,为您提供全流程服务支持 —— 从售前选型咨询到售后技术答疑,全程护航采购与使用体验。
如需采购 ROBOTIS 系列产品,建议通过以下官方正规渠道下单,确保权益无忧:
京东店铺:http://bjrobot.jd.com
淘宝店铺:http://bjrobot.taobao.com

什么是 GELLO?
GELLO —— 为规模化采集机器人演示数据而生的低成本通用遥操作控制器。它通过复刻目标机械臂的完整运动学结构,构建出可直观操控的物理设备。采用3D 打印与标准电机组件,GELLO 大幅降低了硬件门槛,让使用者能够以“手随臂动”的直觉方式,高效生成高质量操作数据。作为具备广泛适配能力的通用型控制器,GELLO 已实现对主流工业及科研机械臂的全面兼容,兼容包括 Franka、UR5、xArm、WidowX 250 以及 ViperX 300 在内的多种主流机器人,并支持灵活扩展。

核心配置详解,硬核硬件打造稳定性能
GELLO 系统的核心部件均选用成熟可靠的 DYNAMIXEL 产品,具体配置如下:
Gello-Franka 机械臂控制器(7自由度)

注意:Gello系列默认使用ZNJ融合板组装交付,特殊情况时会使用ZNJ U2D2启动套装替代!
| DYNAMIXEL XL330-M288-T | 7 | GELLO 臂关节电机 |
| DYNAMIXEL XL330-M077-T | 1 | GELLO 臂关节电机 |
| ZNJ 融合板+5V 5A电源SMPS | 1 | 启动套件 |
| FPX330-H101 4pcs Set | 1 | DYNAMIXEL X330专用架构件副舵盘 |
| 3D打印部件 | 1 | 抓手与控制 Franka 机械臂部件 |
Gello-UR5 机械臂控制器(6自由度)

注意:Gello系列默认使用ZNJ融合板组装交付,特殊情况时会使用ZNJ U2D2启动套装替代!
| DYNAMIXEL XL330-M288-T | 6 | GELLO 臂关节电机 |
| DYNAMIXEL XL330-M077-T | 1 | GELLO 臂关节电机 |
| ZNJ 融合板+5V 5A电源SMPS | 1 | 启动套件 |
| 3D打印部件 | 1 | 抓手与控制 UR5机械臂部件 |
Gello-xArm 机械臂控制器(7自由度)

注意:Gello系列默认使用ZNJ融合板组装交付,特殊情况时会使用ZNJ U2D2启动套装替代!
| DYNAMIXEL XL330-M288-T | 7 | GELLO 臂关节电机 |
| DYNAMIXEL XL330-M077-T | 1 | GELLO 臂关节电机 |
| ZNJ 融合板+5V 5A电源SMPS | 1 | 启动套件 |
| 3D打印部件 | 1 | 抓手与控制 xArm 机械臂部件 |
Gello-WidowX 250 机械臂控制器(6自由度)

注意:Gello系列默认使用ZNJ融合板组装交付,特殊情况时会使用ZNJ U2D2启动套装替代!
| DYNAMIXEL XL330-M288-T | 6 | GELLO 臂关节电机 |
| DYNAMIXEL XL330-M077-T | 1 | GELLO 臂关节电机 |
| ZNJ 融合板+5V 5A电源SMPS | 1 | 启动套件 |
| FPX330-H101 4pcs Set | 1 | DYNAMIXEL X330专用架构件副舵盘 |
| FPX330-S101 4pcs Set | 2 | DYNAMIXEL X330专用架构件 |
| FPX330-S102 4pcs Set | 1 | DYNAMIXEL X330专用架构件 |
| 3D打印部件 | 1 | 抓手与控制 WidowX 250 机械臂部件 |
Gello-ViperX 300 机械臂控制器(6自由度)

注意:Gello系列默认使用ZNJ融合板组装交付,特殊情况时会使用ZNJ U2D2启动套装替代!
| DYNAMIXEL XL330-M288-T | 6 | GELLO 臂关节电机 |
| DYNAMIXEL XL330-M077-T | 1 | GELLO 臂关节电机 |
| ZNJ 融合板+5V 5A电源SMPS | 1 | 启动套件 |
| FPX330-H101 4pcs Set | 1 | DYNAMIXEL X330专用架构件副舵盘 |
| FPX330-S101 4pcs Set | 2 | DYNAMIXEL X330专用架构件 |
| FPX330-S102 4pcs Set | 1 | DYNAMIXEL X330专用架构件 |
| 3D打印部件 | 1 | 抓手与控制 ViperX 300 机械臂部件 |
四大核心优势,完胜传统操控设备
低成本构建,快速部署
- 采用3D 打印部件与 Dynamixel 伺服电机,硬件成本仅为传统专业设备的极小部分,且支持用户根据目标机械臂参数快速定制。
- 已为 Franka、UR5、xArm 三款主流机械臂提供开箱即用的设计模板,用户仅需数小时即可完成组装与校准。
直观操控,媲美目标机械臂的真实体验
- GELLO控制器与目标机械臂的运动学结构(包括关节布局、连杆比例)严格一致,操作者可通过“动力示教”方式直接映射动作,减少学习成本与操作误差。
- 支持动态缩放参数(如α=0.5的舒适操作比例),平衡人机交互舒适度与精确度。
高效数据采集,性能超越传统设备
- 用户研究表明,相比 VR 控制器、3D 空间鼠标等设备,GELLO 在任务完成速度、轨迹精度和操作成功率上提升30%以上,尤其在接触密集型任务(如拧瓶盖、精细装配)中表现突出。
- 支持实时关节位置读取与指令映射,消除延迟干扰,确保数据连贯性。
复杂任务支持,拓展机器人能力边界
- 可执行双手协同操作(如双手开罐、多物体搬运)及需高精度力控的任务(如插拔接口、曲面贴合),为模仿学习提供多样化场景数据。
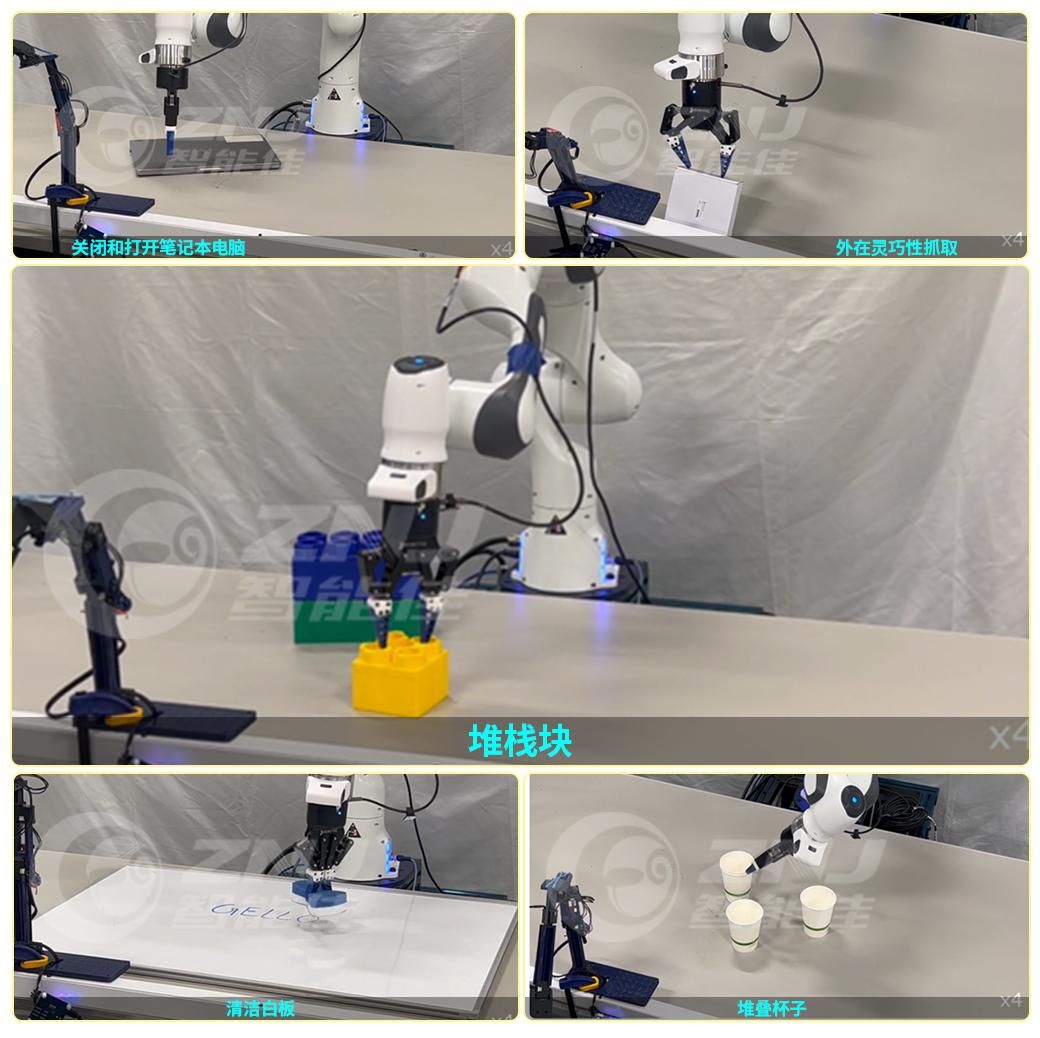
应用场景展示
关键部件详解
GELLO 臂关节电机 —— XL330 系列
XL330系列是一款小巧轻便的DYNAMIXEL,在构建小型应用或在狭小空间内操作DYNAMIXEL时,它是一个非常实用的解决方案。
与之前的入门级型号不同,XL330的电压范围为3.7V至6V,并且具有多种操作模式,包括基于电流的位置控制和电流控制。
- 各种操作模式:速度控制、位置控制、扩展位置控制、PWM控制、电流控制、基于电流的位置控制
- 平滑运动规划的轮廓控制
- 输入电压:3.7V ~ 6V(推荐5V)
- 小型DYNAMIXEL型号 - 尺寸:20 X 34 X 25(宽x高x深)[mm] & 重量:18克
- 无需额外转换设备即可支持RC协议
- 降低电流以节省能源
 |
 |
|
| 产品 | XL330-M288-T | XL330-M077-T |
| 电机 | 有芯电机 | 有芯电机 |
| 分辨率 | 4096 [pulse/rev] | 4096 [pulse/rev] |
| 操作模式 |
电流控制模式 速度控制模式 位置控制模式(0 ~ 360 [°]) 扩展位置控制模式(多圈) 基于电流的位置控制模式 PWM控制模式(电压控制模式) |
电流控制模式 速度控制模式 位置控制模式(0 ~ 360 [°]) 扩展位置控制模式(多圈) 基于电流的位置控制模式 PWM控制模式(电压控制模式) |
| 重量 | 18 [g] | 18 [g] |
| 尺寸(W x H x D) | 20.0 x 34.0 x 26.0 [mm] | 20.0 x 34.0 x 26.0 [mm] |
| 减速比 | 288.4 : 1 | 77.5 : 1 |
| 堵转转矩 |
0.42 [N.m] (at 3.7 [V], 1.11 [A]) 0.52 [N.m] (at 5.0 [V], 1.47 [A]) 0.60 [N.m] (at 6.0 [V], 1.74 [A]) |
0.180 [N.m] (at 3.7 [V], 1.11 [A]) 0.215 [N.m] (at 5.0 [V], 1.47 [A]) 0.228 [N.m] (at 6.0 [V], 1.74 [A]) |
| 无负载转速 |
76 [rev/min] (at 3.7 [V]) 103 [rev/min] (at 5.0 [V]) 123 [rev/min] (at 6.0 [V]) |
278 [rev/min] (at 3.7 [V]) 383 [rev/min] (at 5.0 [V]) 456 [rev/min] (at 6.0 [V]) |
| 工作温度 | -5 ~ +70 [°C] | -5 ~ +70 [°C] |
| 输入电压 | 3.7 ~ 6.0 [V] (推荐 : 5.0 [V]) | 3.7 ~ 6.0 [V] (推荐 : 5.0 [V]) |
| 齿轮材料 | 工程塑料 | 工程塑料 |
| 待机电流 | 17 [mA] | 17 [mA] |
DYNAMIXEL启动套件

ZNJ 融合板在兼容 ROBOTIS 官方推出的 U2D2+U2D2 Power HUB 这两块板子的所有功能,此外还拓展与加强了其他方面的功能,优化部分:
1.供电部分
ZNJ 融合板与 U2D2 Power HUB 供电板兼容电压都是5V-24V,可承受最大电流理论值达到20A,长时间工作电流是10A;官方推出的仅有10A,官方板子仅有5A。
2.舵机驱动部分
ZNJ 融合板支持官方套件的 USB 驱动模式,接口采用了更强的 Type-C口;板子最多可以并联输出4路 TTL 通信舵机或者是RS485通信舵机,官方板子仅支持各2路输出。
注:ZNJ融合板 TTL 与 RS485通信模式可以支持4.5M 波特率或更高。
Dynamixel X330专用结构件副舵盘(FPX330-H101 4pcs Set)

- DYNAMIXEL X330专用铰链结构件和副舵盘组
- 采用高强度工程塑料制造
- 可以用螺栓和螺母固定
- 形成沟槽是便于整齐线路和螺母紧固
- 铰链结构件和副舵盘组封装在一起
Dynamixel X330专用结构件(FPX330-S101 4pcs Set)

- DYNAMIXEL X330专用结构件;
- 采用高强度工程塑料制造;
- 可以用螺栓和螺母固定;
- 形成沟槽是便于整齐线路和螺母紧固;
Dynamixel X330专用结构件(FPX330-S102 4pcs Set)

- DYNAMIXEL X330专用架构件;
- 采用高强度工程塑料制造;
- 可以用螺栓和螺母固定;
- 形成沟槽是便于整齐线路和螺母紧固;
资料获取,解锁更多研发细节
想要了解 GELLO 机械臂遥操作系统的更多技术细节、组装教程与适配案例,可访问官方资料站:https://wuphilipp.github.io/gello_site/
从低成本搭建到高效数据采集,从单臂精细操作到双手协同任务,GELLO 机械臂遥操作系统以高通用、易部署、高性能的特点,为机器人模仿学习与遥操作研发提供了全新的解决方案。无论是高校实验室、机器人研发团队,还是从事工业自动化研究的从业者,都能通过 GELLO 大幅降低研发门槛,让机器人的技能训练更高效、更贴近实际应用。
让机器人学习人类的动作,从未如此简单。
选择智能佳,就是选择放心、专业与可靠!
智能佳机器人
400 099 1872
010-82488500/82488501
www.bjrobot.com



