 400-099-1872
400-099-1872





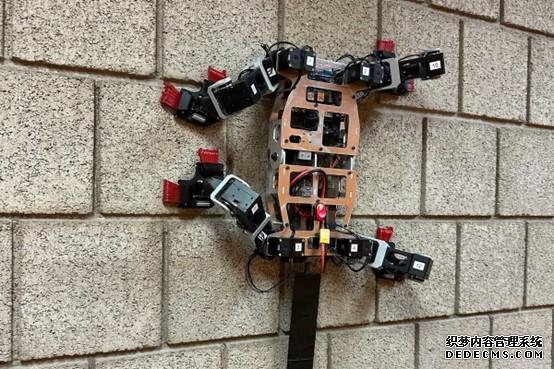
LORIS机器人,图为攀爬混凝土墙 卡内基梅隆大学
科学家们创造了一种以生物为灵感的四脚机器人,它能像其他机器人一样攀爬。它利用一种独特的机制紧贴粗糙的垂直表面,这种机制非常有效,但同时相对简单。
虽然一些实验机器人利用基于吸力的抓取系统来攀爬光滑的表面,但这种技术在岩石等无法形成密封的粗糙表面上不起作用。
一种替代方案是使用所谓的微型夹具。这些包括一系列微小的尖锐钩子,可以钩住被攀爬表面的小角落和缝隙。当夹具被提起以进行下一步操作时,钩子会从该表面松开。
一些微型抓取器是被动的,依靠机器人悬挂体的重量来保持抓取。这种类型在相对平坦的墙壁上可以工作,但在更不规则的表面(如悬崖面)上很难工作,这需要更多样的攀爬策略。
主动微型夹具通过结合电动执行器来绕过这一限制,电动执行器有目的地将一圈钩子沉入表面,从而保持在任何方向上工作的电动握持。然而,这些抓握器往往体积庞大、耗能大、机械复杂,加上它们的攀爬速度相当慢。
这就是LORIS四足机器人的用武之地。

LORIS是与美国国家航空航天局合作开发的,着眼于探索其他行星 卡内基梅隆大学
该设备由卡内基梅隆大学机器人力学实验室的Paul Nadan、Spencer Backus、Aaron M.Johnson及其同事创建,以一种攀爬的有袋动物命名,也以“不规则斜坡的轻型观测机器人”命名。
机器人四条腿的末端各有一个张开的微型棘夹具,包含两组相互成直角排列的棘。夹持器通过一个被动腕关节连接到腿上。这基本上意味着,无论腿在做什么,夹子都会随着动作而摆动。
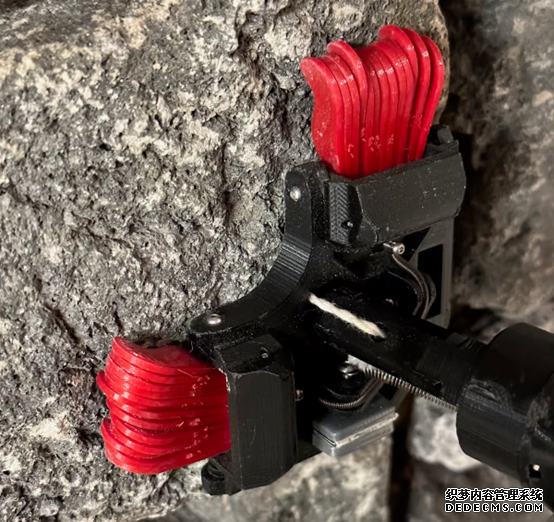
LORIS的每个微型鱼钩都由一个鱼钩组成,鱼钩封装在3D打印的塑料机身中 卡内基梅隆大学
研究人员表示,LORIS将被动微型夹持器的重量轻、速度快、能效高、简单性与主动夹持器牢固的握持和适应性相结合。此外,该机器人的设计简单,制造成本低廉。
资料来源:卡内基梅隆大学
www.bjrobot.com

