 400-099-1872
400-099-1872






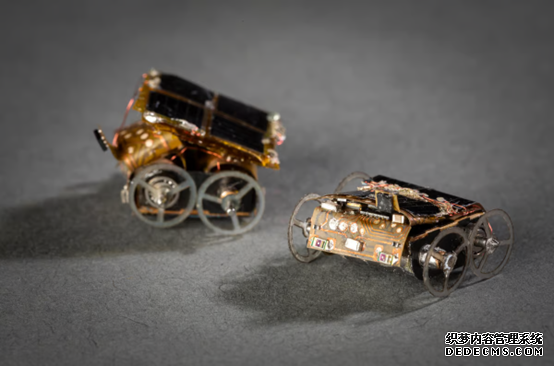
MilliMobile仅由环境光和无线电波供电 Mark Stone/华盛顿大学
在许多情况下,机器人不需要快速移动,但它确实需要在不充电的情况下跑很长距离。微小的能量收集MilliMobile机器人就是为这样的场景而设计的。
该四轮原型装置由华盛顿大学的一个科学家团队创建,每侧尺寸仅为10毫米(0.4英寸),天平的尖端约为1克(0.04盎司)。
它不包含电池,但包含两个电机、一个碳纤维底盘、一个可折叠印刷电路板、一个光传感器、太阳能电池和一个天线。更重要的是,它可以以相机和环境传感器等货物的形式携带高达自身重量三倍的货物。
当MilliMobile沿着地板、混凝土、沥青或堆积的泥土等平坦表面移动时,它会从环境光和无线电波中收集能量。据报道,即使在阴天,它也能在一小时内覆盖约30英尺(9米)的距离。它是通过增量移动来实现的,而不是试图储存足够的电力来连续完成整个旅程。
该研究的共同主要作者、博士生凯尔·约翰逊说:“我们的灵感来自‘间歇计算’,它将复杂的程序分解成小步骤,这样一个功率非常有限的设备就可以在能量可用的情况下增量工作。”。“通过MilliMobile,我们将这一概念应用于运动。”
MilliMobile成功的秘诀在于它的移动速度是递增的 Mark Stone/华盛顿大学
利用其光传感器,机器人可以自主地将自己转向指定的光源。它还可以通过蓝牙传输传感器数据——在迄今为止进行的测试中,它已经成功地中继了来自机载光、温度和湿度传感器的数据。
展望未来,协作群中的多个MilliMobiles可能会无线共享数据。该技术的潜在应用包括监测农场的土壤湿度、对工厂的机械进行检查或寻找气体泄漏的来源。
科学家们将在马德里举行的ACM MobiCom 2023会议上发表一篇关于他们研究的论文。在下面的视频中,您可以看到MilliMobile在运行。
资料来源:华盛顿大学
行业资讯
微型能量采集MilliMobile机器人不需要电池
作者: bjrobot 时间:2023-12-14 来源:未知
摘要:MilliMobile仅由环境光和无线电波供电 Mark Stone/华盛顿大学 在许多情况下,机器人不需要快速移动,但它确实需要在不充电的情况下跑很长距离。微小的能量收集MilliMobile机器人就是为这

