400-099-1872
400-099-1872





产业升级、 机械自动化等离不开电机的广泛使用,常见的有伺服电机、步进电机、直流电机、舵机等类型。舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的闭环控制执行模块。小巧的舵机能在空间紧凑的地方发挥它的作用。

炎炎夏日,DYNAMIXEL 舵机新品发布,忠于品质,一如既往得精心设计。
XC430-T150BB/T240BB-T该产品将金属滚珠轴承应用于XC430系列,而不是塑料套。
这一变化提高了旋转轴上垂直载荷的耐久性。
其他规格与现有XC430系列相同。


包装组件
| XC430-T150BB/T240BB-T | 1 |
| HN11-N101(已装配) | 1 |
| 机器人电缆-X3P 180mm | 1 |
| 螺栓M2.6x5 TAP | 5 |
| 螺栓 M2x5 | 5 |
| 垫片 | 5 |
不包括副舵盘组(HN11-i101组)
产品规格/XC430-T150BB-T
| 项目 | 规格 |
| MCU | ARM CORTEX-M3 (72 [MHz], 32Bit) |
| 位置传感器 | 非接触式绝对编码器(12Bit,360[°]) |
| 电机 | 无芯 |
| 波特率 | 9,600 [bps] ~ 4.5 [Mbps] |
| 控制算法 | PID控制 |
| 分辨率 | 4096 [pulse/rev] |
| 操作模式 |
速度控制模式 位置控制模式(0 ~ 360 [°]) 扩展位置控制模式(多圈) PWM控制模式(电压控制模式) |
| 重量 | 65 [g] |
| 尺寸(宽x高x深) | 28.5 x 46.5 x 34 [mm] |
| 传动比 | 159.59 : 1 |
| 失速扭矩 | 1.6 [N.m] (at 12.0 [V], 1.4 [A]) |
| 空载速度 | 106 [rev/min] (at 12.0 [V]) |
| 工作温度 | -5 ~ +80 [°C] |
| 输入电压 | 6.5 ~ 14.8 [V] (推荐值: 12.0 [V]) |
| 命令信号 | 数字包 |
| 物理连接 |
TTL级多点总线 半双工异步串行通信 (8bit, 1stop, No Parity) |
| ID | 253 ID (0 ~ 252) |
| 反馈 | 位置、速度、负载、实时刻度、轨迹、温度、输入电压等 |
| 外壳材料 | 工程塑料(主体) |
| 齿轮材料 | 全金属齿轮 |
| 待机电流 | 46 [mA] |
多种布线方法

图纸

兼容产品
注意事项
在组装后盖之前,整理缠绕的连接线。
连接线理顺再安装舵机后盖。缠绕在一起的连接线可能会被外壳压扁,从而导致通信错误。
如果使用两根电缆穿过空心外壳,电缆会损坏。
仅允许一根连接线通过外壳孔穿出。
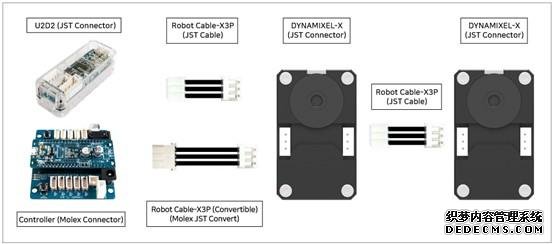
DYNAMIXEL-X系列采用新型镀金JST连接器,实现安全可靠的通信。
以前的Dynamixel使用的是Molex连接器。
要通过OpenCM或USB2Dynamixel控制DYNAMIXEL-X系列执行器,请使用包装中舵机转换线。
但是,XL430型号中不包括舵机转换线。
使用仅支持JST连接器的控制器和接口时,请自行购买舵机转换线。
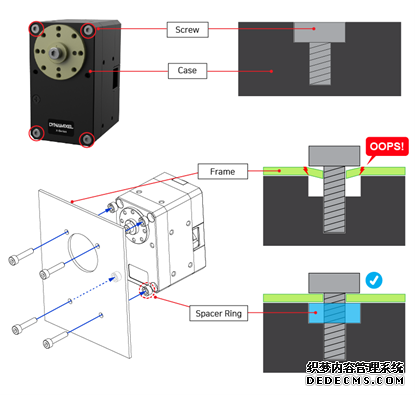
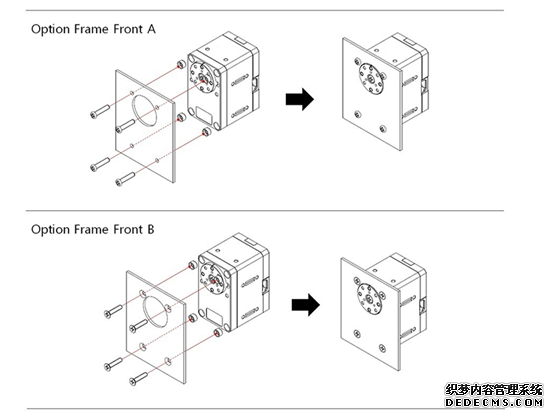
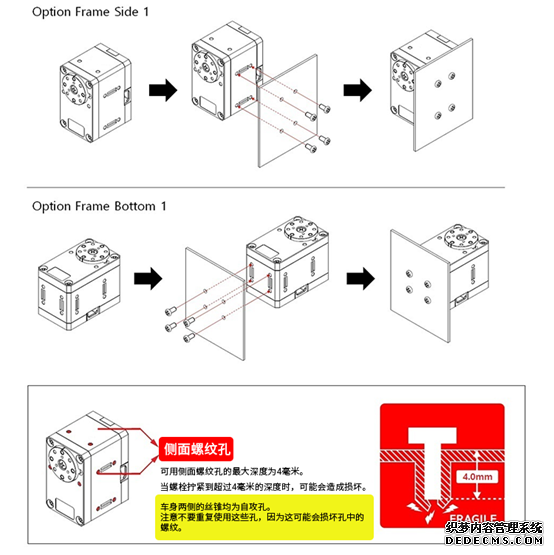
安装示例